Drohne bauen
Drohne selbst bauen
Eine ausführliche Hilfestellung
In diesem Artikel möchte ich dir helfen deine eigene Drohne zu bauen. Dieser Artikel ist wie folgt aufgebaut:
- Generelles und Vorüberlegungen
- Vollständiger Bau einer Drohne
- FAQ – Deckt die meisten wichtigen Fragen ab
Wenn du eine spezielle Frage hast, dann kannst du auch mit der Tastenkombination STRG+F nach allen möglichen Stichworten suchen.
Dieser Artikel ist nur ein kleiner Teil unserer umfassenden Informationsdatenbank. Auf unserer Website findest du genauere Informationen zu allen Bauteilen oder Werkzeug, sowie den Kaufempfehlungen in separaten Artikeln. Weiter unten auf der Seite findest du alle wichtigen Verlinkungen.
Lohnt es sich für mich die Drohne selbst zu bauen?
Vorab muss man sich zuerst einmal fragen, ob oder warum man eine eigene Drohne bauen möchte. Man muss herausfinden, ob es überhaupt Sinn macht, sich eine eigene Drohne zu bauen.
Ich nenne im Folgenden ein paar Szenarien in welchen es vermutlich sinnvoll ist, sich eine eigene Drohne zu bauen und Szenarien in denen der Kauf einer fertigen Markendrohne vermutlich die bessere Wahl ist. Bitte beachte, dass auf dich nicht alle Dinge zutreffen müssen und diese Überlegung nur zur groben Orientierung dient.
Drohne selbst bauen (PRO):
- Du interessierst dich für Technik und hast Spaß zu tüfteln
- Du möchtest FPV-Drohnen fliegen (gekaufte FPV-Drohnen sind meist schlechter als selbst gebaute)
- Du willst viel Drohne für wenig Geld
- Du bist nicht nur an den Videoaufnahmen interessiert, sondern auch am Spaß beim Fliegen
- Du möchtest eine Drohne die sehr langlebig und widerstandsfähig ist und viele Abstürze überlebt
- Du möchtest deine Drohne individualisieren
- Du willst professionelle Aufnahmen machen und hast besondere Ansprüche an deine Drohne (z.B. bewegliche Kamera, DIY Beleuchtung, besonders schwere Kamera usw.)
- Du suchst ein Hobby rund um das Thema Drohnen
Drohne kaufen (Contra):
- Du willst jemandem eine Drohne schenken
- Du möchtest hochqualitative Aufnahmen machen, bist aber nicht Technik interessiert (du willst keine Drohne, sondern praktisch eine fliegende Kamera)
- Du willst nur mal nebenher ein bisschen Drohne fliegen
Falls du nun der Meinung bist, dass du lieber eine Drohne kaufst, anstatt eine zu bauen, dann schau doch mal hier vorbei. Ich habe hier die Testsieger aufgelistet, vielleicht ist ja was für dich dabei.
Art der Drohne
Wenn du dich dazu entschieden hast deine eigene Drohne zu bauen, dann musst du dir überlegen welche Art von Drohne du bauen möchtest. Dazu ist es sinnvoll sich eine Liste von Dingen aufzuschreiben, welche man von der Drohne erwartet:
- Soll eine Flugzeit von x Minuten haben
- Soll eine Kamera mit einer Auflösung von mindetens x haben
- Soll mindestens x Km/h schnell sein
- Soll FPV unterstützen
- Soll unter 2kg wiegen (siehe Gesetze/Regelungen)
- …
Erste Schritte
Die erste Drohne zu bauen wird nicht leicht. Man braucht Erfahrung um sauber zu arbeiten und um Fehlern aus dem Weg zu gehen. Man sollte nicht zu viel Geld in die erste selbst gebaute Drohne investieren. Das muss zwar jeder für sich selbst entscheiden, aber ich empfehle nicht über 300€ in die erste Drohne zu investieren. Das Risiko ist meiner Meinung nach einfach zu groß, dass man aus Versehen teure Teile beim Löten oder auf anderem Weg zerstört.
Grundlegend braucht man drei Dinge um eine Drohne zu bauen.
- Werkzeug
- Informationen
- Bauteile
- Werkzeug kostet Geld und da nicht jeder alles zuhause hat, fallen hier bei den meisten schon die ersten Kosten an. Ich habe einen Artikel über Werkzeug geschrieben, in welchem das Basic-Werkzeug zum Drohnenbau aufgelistet ist. Wenn man das besorgt hat, kann es weiter gehen.
- Als nächstes kommen die Informationen. Wenn du dir also überlegt hast welche Art von Drohne zu bauen möchtest, dann empfehle ich dir einen Blick in meine Informationen, bzw. Erläuterungen zu den einzelnen Teilen zu werfen. Ich habe zu allen wichtigen Teilen Artikel geschrieben, welche hoffentlich alles in ausreichender Tiefe erklären. In diesen Artikel wird erklärt wofür man die Teile benötigt und worauf man beim Kauf achten sollte.
- Damit kommen wir auch schon zu den Bauteilen. Wenn du also nicht sicher bist welche Teile du kaufen möchtest oder worauf du achten musst, dann überfliege die einzelnen Artikel kurz, damit du einen Anhaltspunkt erhälst, welche Teile du genau benötigst. Des Weiteren kannst du auch gerne in meine Kaufempfehlungen schauen, in welchen ich verschiedene Bauteile vorschlage, die ich selbst empfehle. Natürlich ist das nur meine Meinung. Alle wichtigen Links weiter unten.
- Ein Problem auf welches man schon ziemlich am Anfang stößt, ist die Frage woher man die Bauteile eigentlich bekommt. Schließlich gibt es keinen Drohnenbauteileladen. Hier muss man, wie bei vielem heute auf Onlineshops zurückgreifen. Aber auch auf Amazon wird man meistens nicht fündig. Amazon bietet solche Nischenprodukte einfach selten an. Meine persönliche Wahl und Empfehlung sind Deutsche Onlineshops (Copterfarm, FPV24, RCTech) und Banggood. Banggood ist ein chinesischer Großhändler und oft die einzige Chance um an die gewünschten Teile zu kommen. Banggood ist kein kleiner dubioser Onlineshop, sondern eine Art Konkurrent zu Amazon. Die Vorteile sind die riesen Auswahl an RC-Teilen, faire Preise, PayPal Zahlung möglich (man muss keine Kreditkartendaten angeben), teilweise Lagerbestand in Großbritannien und häufig kostenloser Versand. Die Nachteile sind die meist langen Lieferzeiten von bis zu 20 Tagen und fehlende oder schlechte deutsche Übersetzungen. Ich selbst habe fast alle meine Drohnenteile von Banggood bestellt (Ich werde nicht von Banggood gesponsert das zu sagen).
Wenn du die oben aufgelisteten Punkte alle erledigt hast, dann kann es eigentlich direkt losgehen!
Drohne selbst bauen - Schritt für Schritt
Genauere Informationen findest du in den Artikeln, welche unten auf der Seite verlinkt sind.
Im folgenden Abschnitt werde ich eine Drohne von Grund auf aufbauen. Das soll eine Hilfestellung sein, damit man einen groben Eindruck von den verschiedenen Schritten bekommt. Wenn du deine eigene Drohne baust, dann empfehle ich dir, diesen Artikel während deines Drohnen-builds nebenher offen zu haben. Falls du dir bei etwas unsicher bist, dann werden dir die einzelnen Schritte hier näher gebracht.
Bitte beachte aber, dass ich für diesen Build höchst wahrscheinlich andere Teile verwende als du. Das ist aber erst einmal egal, weil die grundlegenden Schritte fast die gleichen sind. Außerdem möchte ich darauf hinweisen, dass ich hier lediglich die grundlegenden Schritte aufzeige. Für Detailwissen stehen dir meine ausführlichen Artikel zu den verschiedenen Bauteilen einer Drohne zur Verfügung.
Voraussetzung für dieses Tutorial ist, dass du bereits alle Teile die du benötigst besitzt und auch alle Werkzeuge zur Verfügung hast. Falls das nicht der Fall sein sollte, dann kannst du dich in meinen anderen Artikeln darüber informieren.
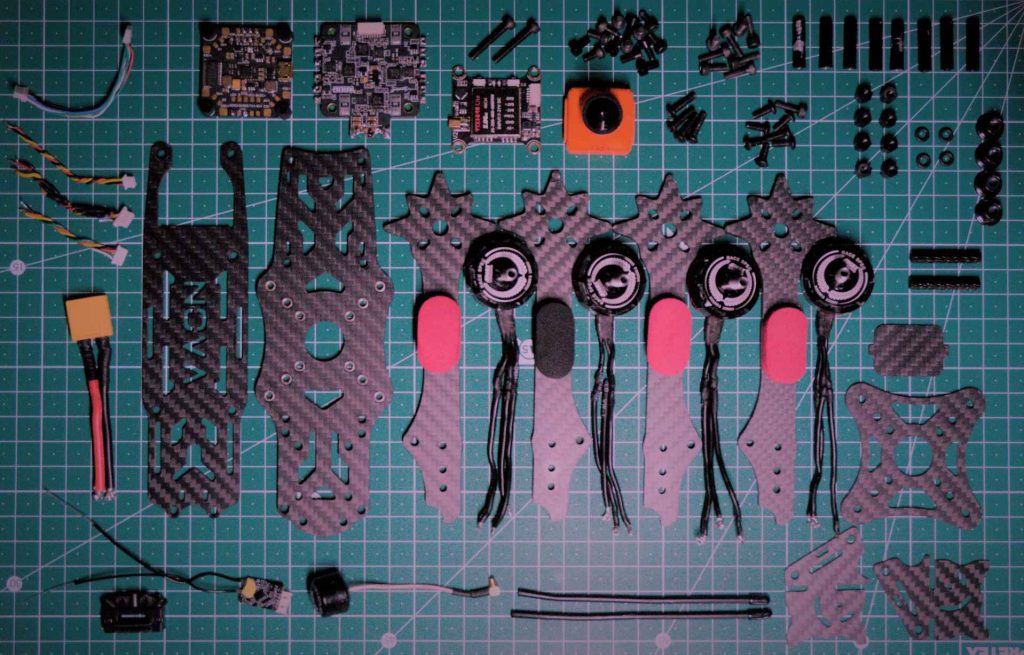
Verwendete Teile:
Für diesen Build verwende ich Teile, welche bereits im Einsatz waren. Deswegen bitte nicht verwirrt sein, dass manche Teile schon ein paar Gebrauchsspuren aufweisen.
Für diesen Build verwende ich folgende Bauteile:
- Bardwell 4-in-1 ESC
- Bardwell F4 V2 AIO Flightcontroller (man kann den ESC und den FC zusammen kaufen -> Bardwell Combo)
- VTX5848 Lite
- RunCam Eagle 2 Pro
- Emax RS2205, 2300KV
- Skitzo Nova FPV Frame
1. Schritt - Frame Arme anbringen:
Hier unterscheidet sich meine Anleitung von deinem eigenen Build wahrscheinlich am meisten, denn Frames gibt es in allen möglichen Formen und Varianten. Überspringe einfach alle Schritte, welche für dich überflüssig sind.
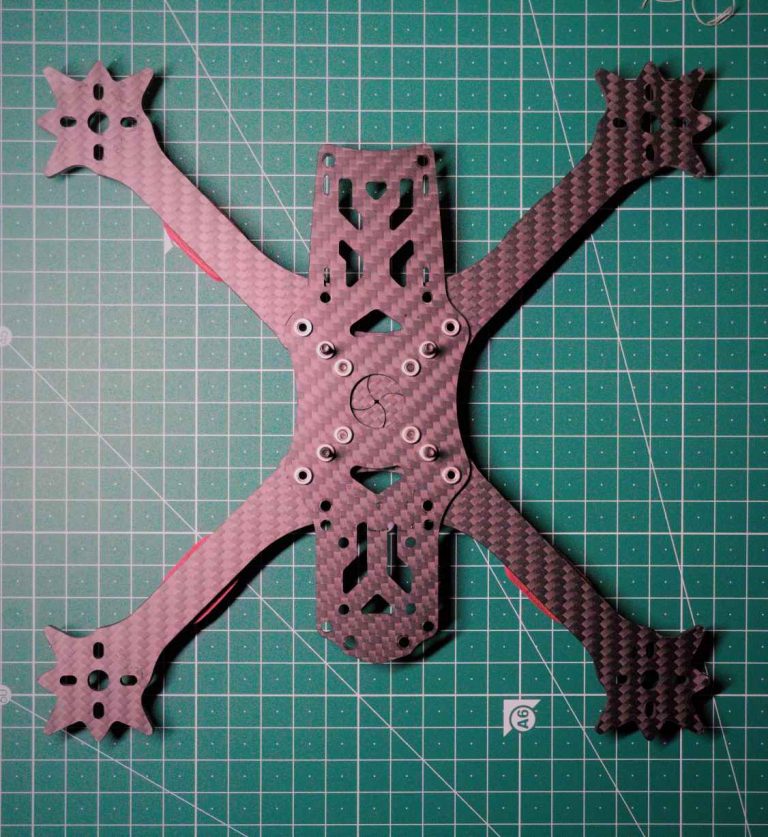
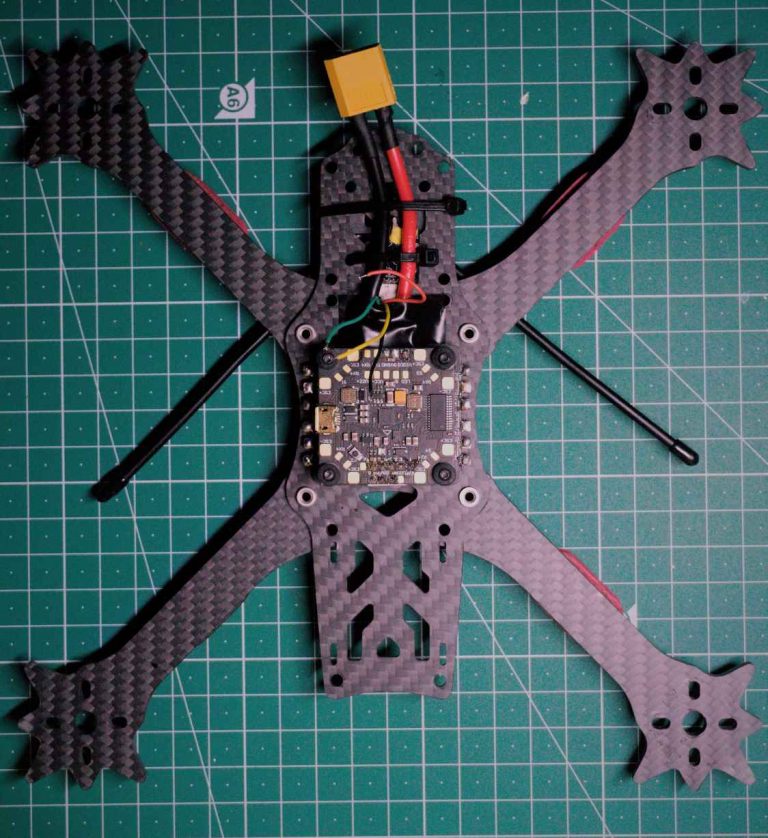
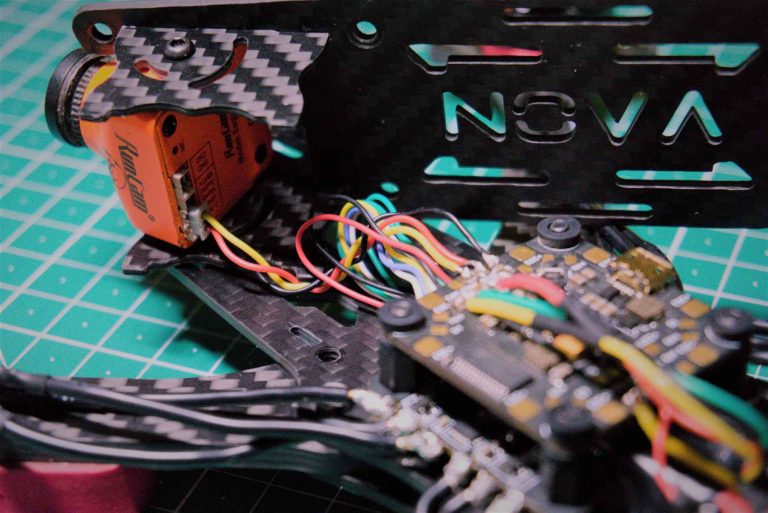
- Man beginnt mit der Bodenplatte. An diese muss man die Arme der Drohne anschrauben. Die Arme werden meist je mit 3-4 Schrauben befestigt. Hier muss man beachten, dass eine Schraube pro Arm länger als die anderen sein muss. Diese Schraube dient nicht nur zur Befestigung des Arms, sondern auch als Halterung für Flightcontroller und ESC. Auf dem Bild unten ist meine Bodenplatte zu sehen. Man sieht drei Löcher in jeder Ecke. Man muss nun herausfinden, durch welches dieser Löcher die 4 langen Schraube müssen. Dazu legt man seinen Flightcontroller einfach auf die Bodenplatte und schaut welche der Löcher mit denen des Flightcontrollers übereinstimmen. Bei mir sind es die mittleren Löcher.
- Beim Skitzo Nova Frame sind die Löcher auf der Innenseite der Bodenplatte mit einem Gewinde versehen. Dadurch muss ich keine Muttern anbringen, um die Schrauben festzuhalten. Bei vielen anderen Frames muss man das aber. Wenn du also Muttern hast, dann musst du dieses wahrscheinlich dafür verwenden.
- Wenn dein Frame eine weitere Halterungsplatte hat, dann musst du die Arme zwischen Frame und dieser Halterungsplatte befestigen (quadratische Halterungsplatte ist unten auf Bild zu sehen).
- Nimm dir einfach einen der vier Arme und schraube ihn erstmal mit zwei Schraube locker am Frame fest. Das wiederholst du dann bei allen Armen.
- Wenn alle Arme in Position sind, kann man die fehlenden Schrauben einschrauben und alle Schrauben fest anziehen.
- Wenn du auf Nummer sicher gehen willst, dann kannst du auch Kleber zur Schraubenfixierung (z.B. Loctite) verwenden. Dadurch halten die Schrauben länger und lösen sich nicht so schnell aus dem Frame. Mit der Zeit sollte man die Schrauben aber generell nachziehen.
Bevor man den Frame jetzt fertig zusammenbaut, wird im nächsten Schritt erst mit der Elektronik weiter gemacht.



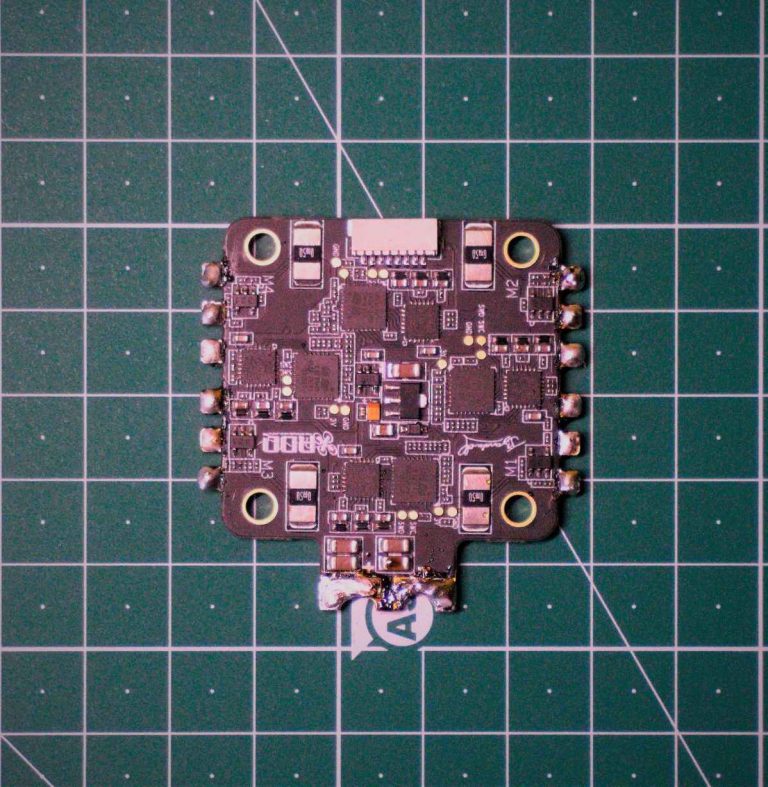
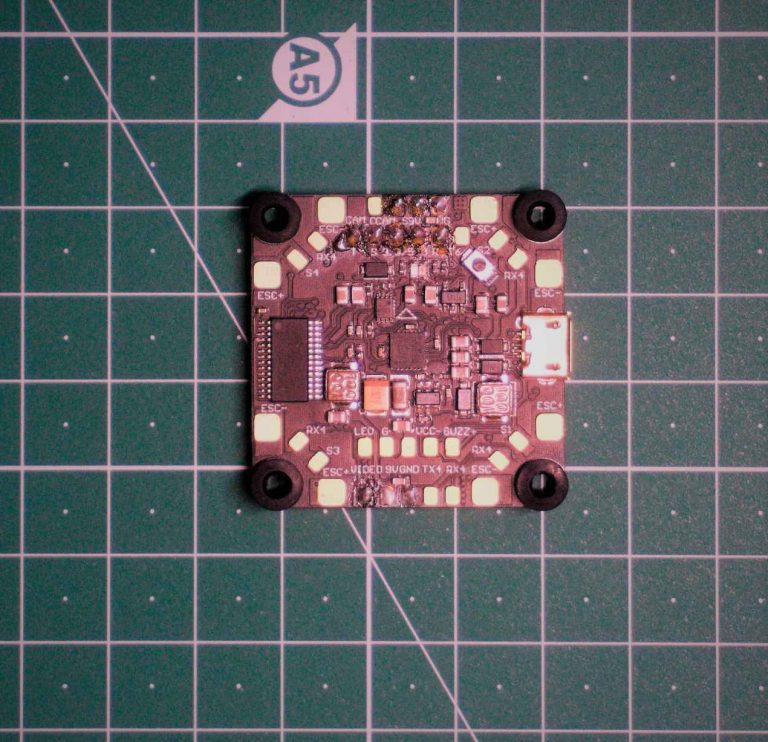
2. Schritt - Flightcontroller / 4-in-1 ESC / ESC / PDB vorbereiten:
- Bevor wir anfangen den Flightcontroller, das PDB, ESC usw. aufzustecken und zu verbauen, tragen wir bei all diesen Teilen, auf alle Lötstellen, an welche wir später Kabel anschließen schon mal Lötzinn auf. Wenn der Flightcontroller auf dem Frame sitzt, dann ist es oft schwieriger daran zu arbeiten, weil weniger Platz ist. Wenn die Lötstellen aber schon mit Lötzinn beschichtet sind, dann spart man sich später einiges an Rumgefuchtel.
- Am besten überlegt man sich vorher schon wo was angeschlossen werden muss, damit man weiß welche Lötstellen man mit Lötzinn beschichten muss. Es kommt nämlich selten vor, dass man z.B. auf dem Flightcontroller alle Lötstellen tatsächlich verwendet.
- Beachte auch, dass manche Flightcontroller auch auf der Unterseite Kontakte haben.
Für meinen Build benutze ich kein PDB, sondern nur ein 4-in-1 ESC. Egal welche Teile du verwendest, solltest du in diesem Schritt alle Lötstellen mit Lötzinn versehen.
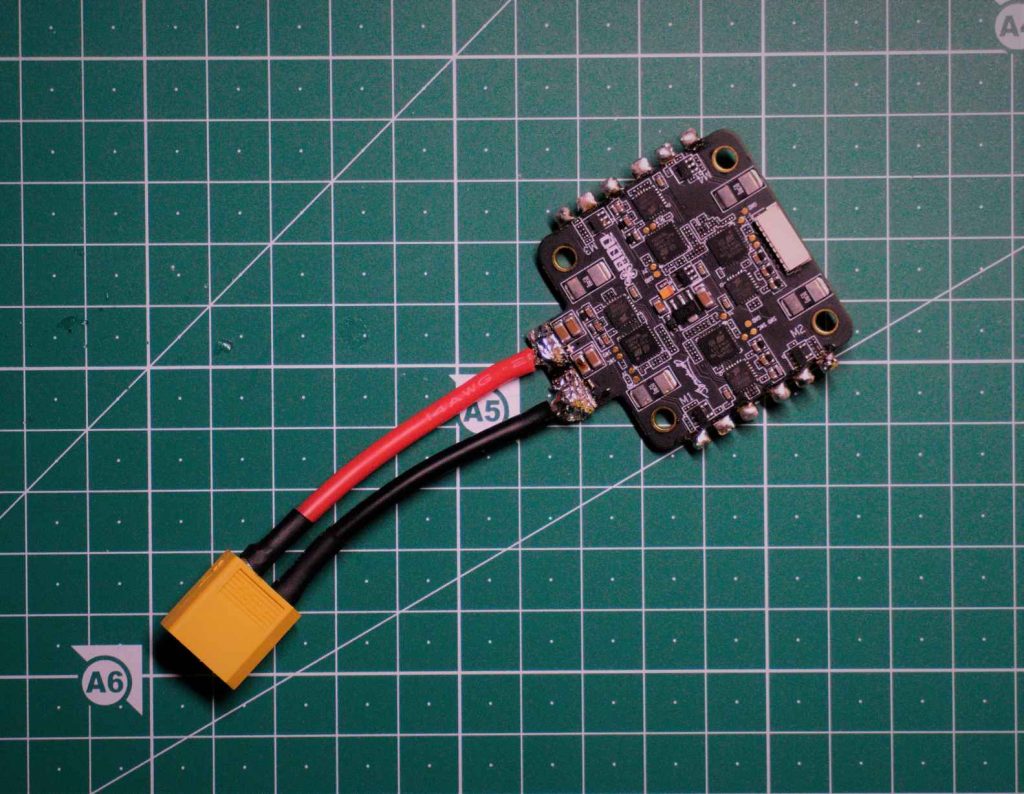
3. Schritt - Batteriekabel:
Um den Akku später an die Drohne anschließen zu können, bedarf es einem Batteriekabel. Dieses kann man fertig kaufen oder selbst machen.
- Dazu lötet man zwei Kabel (+ und -) an einen Stecker (meist xt60). Bitte stelle sicher, dass das Kabel dick genug ist, um die Strommenge auszuhalten. Ich verwende ein 14AWG Kabel und rechne mit 80-100A Stromfluss. Man benötigt ein schwarzes (-) und ein rotes (+) Kabel. Außerdem muss man herausfinden, wie lange das Kabel sein soll.
- Das Kabel wird entweder an ein PDB oder 4-in-1 ESC angeschlossen (was man eben verwendet). Je nachdem, ob man einen Frame hat, bei dem der Akku oben oder unten auf der Drohne befestigt wird, muss das Kabel dementsprechend lang sein.
- Auch die Art und Weise wie man das Kabel verlegt ist ausschlaggebend. Man kann es seitlich aus dem Frame herausführen oder es hinten aus der Drohne herausführen.
- Auch die Länge Kabels, welches am Akku montiert ist sollte in die Überlegung miteinbezogen werden.
- Es ist nicht leicht die richtige Länge zu finden. Ich persönlich lege mir ein wenig Kabel an mein 4-in-1 ESC, schaue dass es so lange ist, dass es etwa 2-2.5cm aus dem Frame herausschaut und schneidet es dann ab.
- Ich habe mich bei meinem Build dazu entschieden das Kabel hinten aus der Drohne herauszuführen, denn ich habe schlechte Erfahrungen damit gemacht es seitlich herauszuführen, weil die Propeller dadurch näher am Kabel sind und bei einem Crash in das Kabel schneiden können.
- Im nächsten Schritt muss man den Stecker mit den Kabeln verlöten. Um den richtigen Stecker zu finden, muss man sich den Stecker des Akkus ansehen und das passende Gegenstück verwenden.
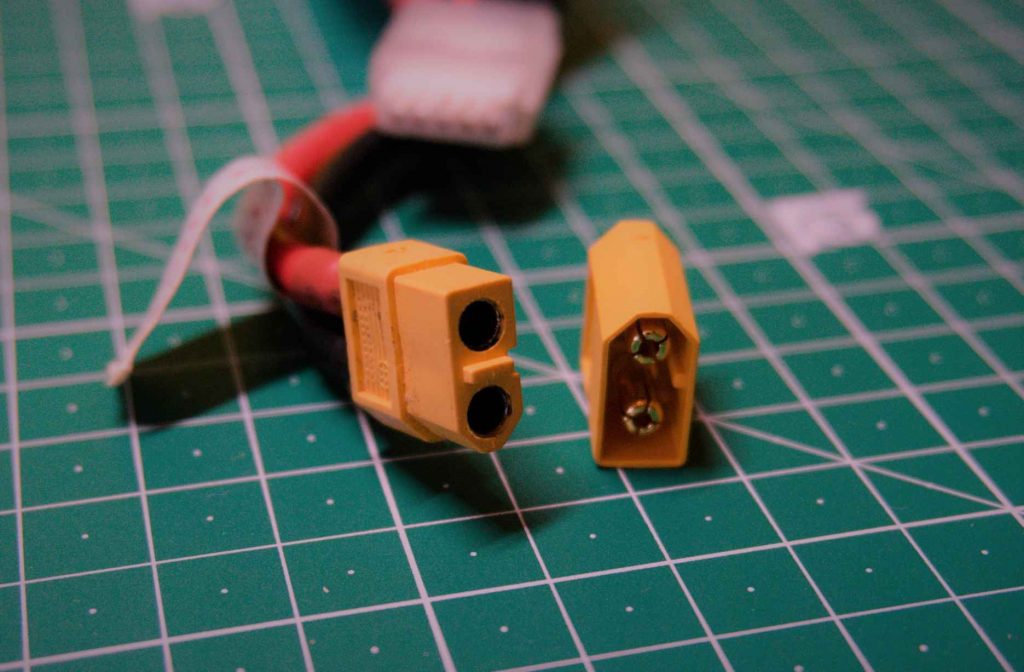
- Wenn der passende Stecker gefunden ist, muss man ein Ende der beiden Kabel etwa 1cm abisolieren und eine dünne Schicht Lötzinn auftragen. Nicht zu dick, sonst passen die Kabel nicht mehr in den Stecker rein.
- Als nächstes steckt man eines der Kabel hinten in eines der dafür vorgesehenen Löcher des Steckers und lötet dieses mithilfe der Zugabe von weiterem Lötzinn fest. Hier darauf achten, dass das rote Kabel in Plus vom Stecker und das schwarze Kabel im Minus vom Stecker steckt. Auf dem Stecker sind seitlich die Markierungen zur Polarität (+ und -)
- Das wiederholt man mit dem zweiten Kabel.
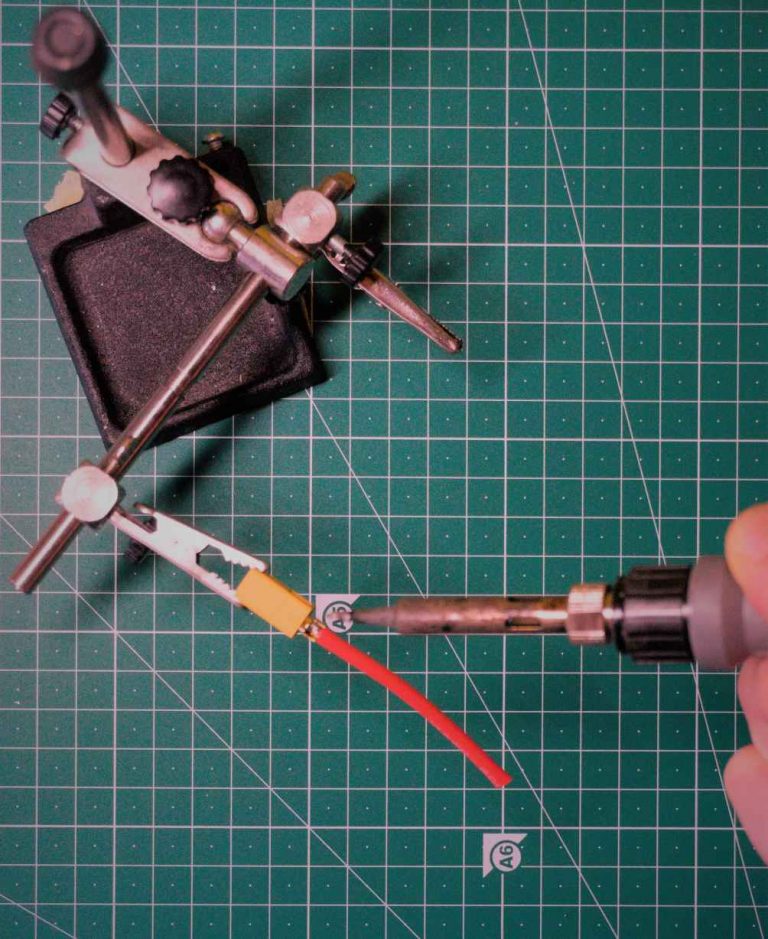
- Am besten fixiert man den Stecker in einer Klemme, weil er beim Lötvorgang heiß wird und man ihn ab einem gewissen Punkt nicht mehr mit den Händen kann/sollte. Falls es nicht gleich klappt und man länger mit dem Löten braucht, sollte man dem Stecker ein wenig Zeit zum Abkühlen lassen. Wenn er zu heiß wird, dann schmilzt das Plastik und er wird unbrauchbar.
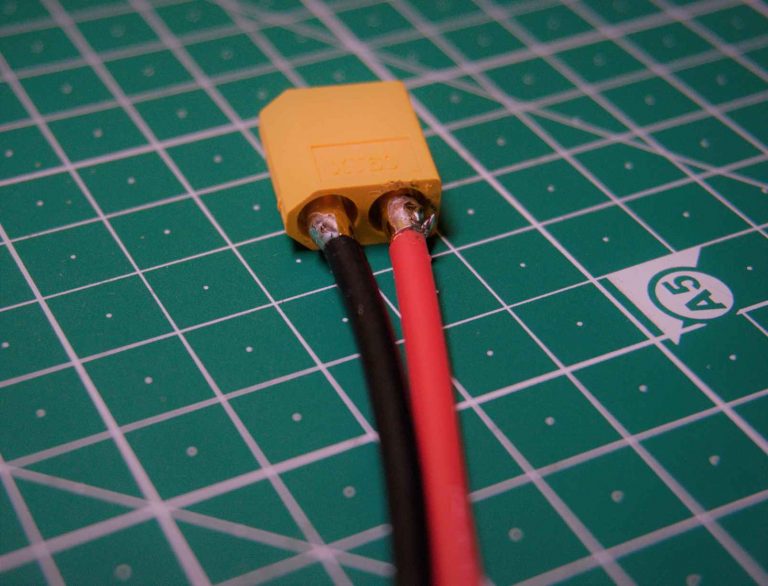
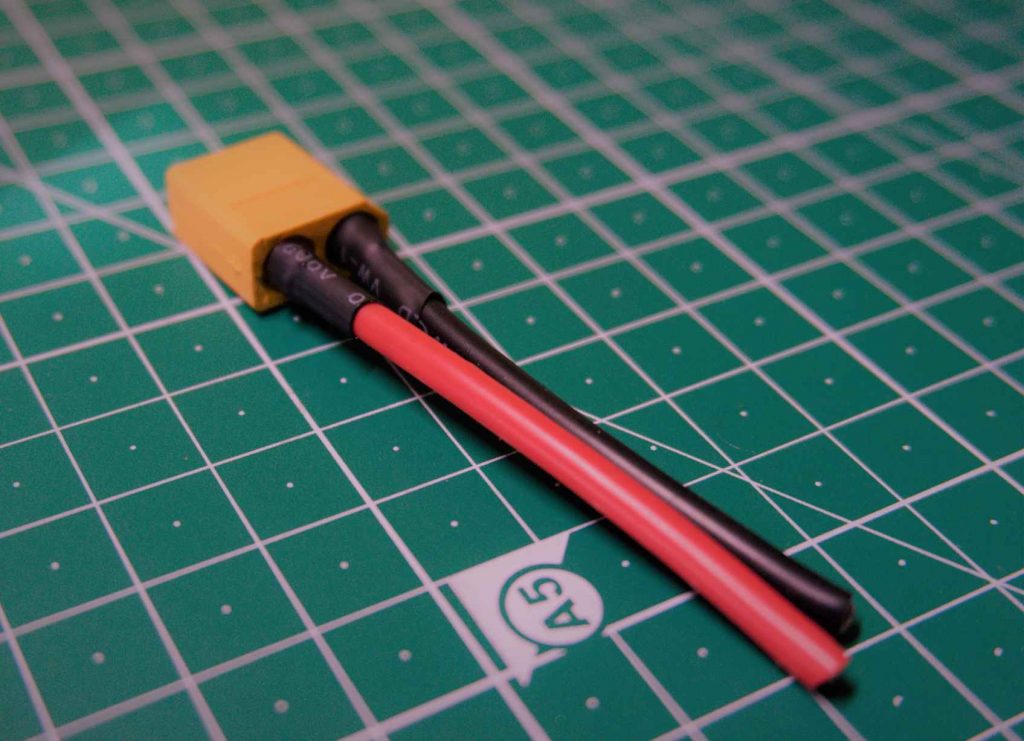
- Wenn die Kabel angelötet sind, dann muss man noch Schrumpfschlauch über diese Lötstellen schieben.
- Am besten wartet man damit, bis der Stecker etwas abgekühlt ist, weil sich der Schrumpfschlauch sonst durch die Wärme schon frühzeitig zusammenzieht und man ihn deswegen nicht über die Kontakte stülpen kann.
- Wenn der Schrumpfschlauch über den Kontakten sitzt, erhitzt man ihn, indem man ein Feuerzeug in einem Abstand von etwa 5cm unter den Schrumpfschlauch hält. Dadurch zieht er sich zusammen.
- Anschließend kann man das Batteriekabel entweder am 4-in-1 ESC oder am PDB befestigen.
- Die Lötstelle am PDB / 4-in-1 ESC sollte schon durch einen vorherigen Schritt mit Lötzinn beschichtet sein. Wenn nicht, dann sollte man das jetzt tun.
- Die Kabelenden des Batteriekabels müssen abisoliert werden (etwa 0.5cm) und auch mit einer dünnen Zinnschicht versehen werden.
- Anschließend kann man die beiden Kabel nacheinander am PDB anlöten. Hier unbedingt darauf achten, dass das rote Kabel (+) am Pluspol und das schwarze Kabel (-) am Minuspol angeschlossen wird. Am besten vergleicht man nochmal ob die Polarität auch wirklich richtig ist.
- Keines der beiden Kabel darf sich lösen, weil es sonst zu einem Kurzschluss kommen könnte. Weil die Kabel sehr dick sind, ist das Anlöten relativ schwer. Wenn man das Kabel nicht dran bekommt, dann kann man versuchen die Temperatur am Lötkolben etwas zu erhöhen. Zu hohe Temperaturen sind aber auch nicht gut, weil man sonst die Platine beschädigt.
- Die Lötstelle zwischen Kabel und PDB / 4-in-1 ESC darf auf keinen Fall Kontakt zum Frame haben. Dieser leitet, wenn er aus Kohlefaser ist Strom. Am besten Klebt man etwas Isolierband auf die Stelle des Frames, über welche sich diese Lötstelle befindet.
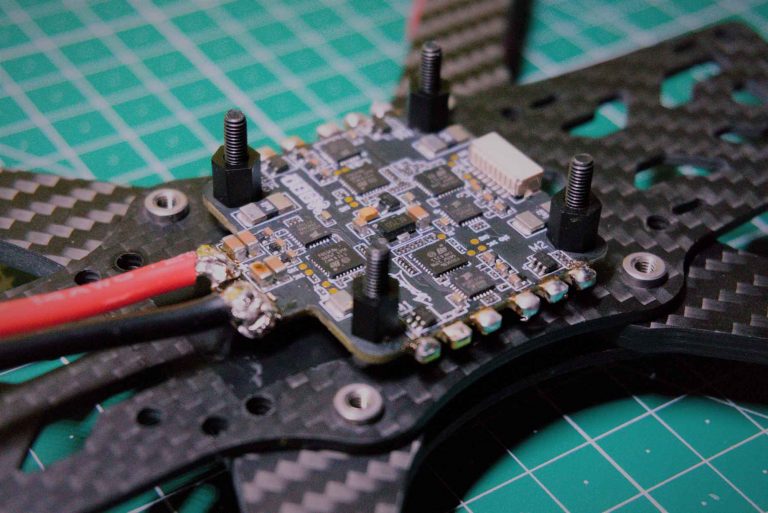
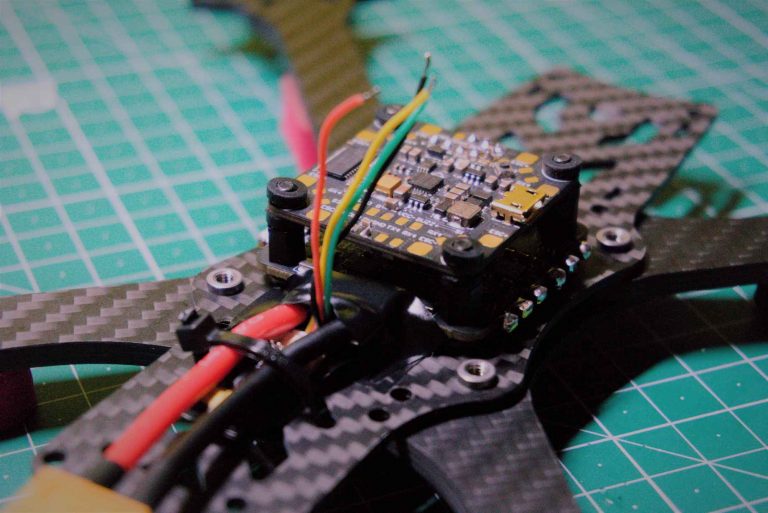
4. Schritt - ESC / PDB / Flightcontroller / Transmitter /Receiver einbauen:
- Jetzt werden die Hauptkomponenten am Frame befestigt.
- Normalerweise sitzt das PDB / 4-in-1 ESC unten und der Flightcontroller darüber.
- Bevor ich eine der Platinen befestige, stülpe ich kleine Gummiringe über die 4 langen Schrauben. Diese sollen verhindern, dass sich Vibrationen vom Frame auf den Flightcontroller übertragen. Das kann zu unruhigem Verhalten beim Fliegen führen. Dieser Schritt ist optional aber sehr sinnvoll. Als Gummringe kann man sich einfach ein Set Dichtungsringe kaufen.
- Nach den Gummiringen kommt das PDB / 4-in-1 ESC. Hier musst du darauf achten, dass du die Platine in der richtigen Ausrichtung anbringst. Der Frame hat ein Vorne und ein Hinten. Zur Unterscheidung: Vorne hat meist 4 kleine rechteckige Aussparungen in der Bodenplatte, in welche man die Kamerahalterung steckt. Wenn ich also das Akkukabel hinten aus der Drohne rausführen möchte, sollte ich wissen wo vorne und hinten ist.
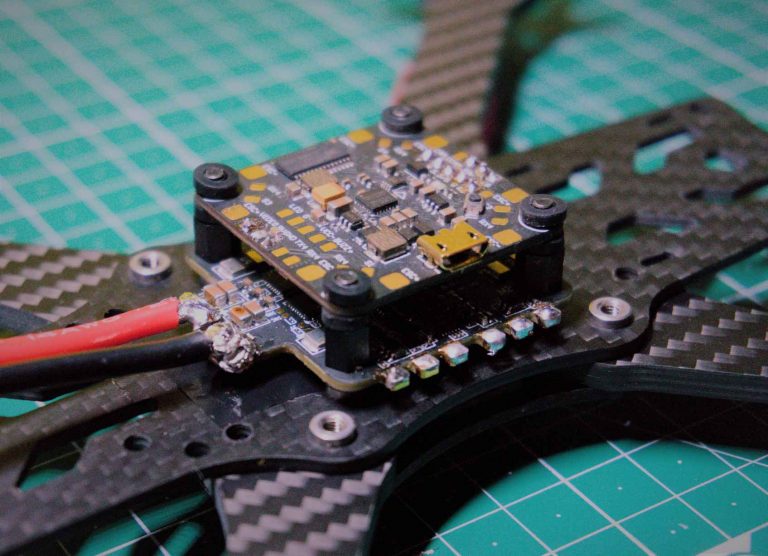
- Das ESC / PDB wird mit kleinen Kunststoffabstandshaltern befestigt. Diese fixieren die Platine und bieten gleichzeitig Abstand zum Flightcontroller, welcher als nächstes aufgesteckt wird. Flightcontroller und PDB/4-in-1 ESC dürfen auf keinen Fall direkten Kontakt haben (sich nicht direkt berühren).
- Falls du kein 4-in-1 ESC hast, sondern 4 einzelne ESC’s, dann werden diese nicht in der Mitte des Frames montiert, sondern jeweils auf den Armen der Drohne.
- Wenn man an der Unterseite des Flightcontrollers keine Kabel anbringen muss, dann kann man diesen jetzt über das PDB / ESC stecken. Falls man jedoch Kabel an seine Unterseite löten muss, dann sollte man diesen Schritt jetzt angehen.
- Manche Flightcontroller (wie der von Bardwell) werden mit kleinen Gummiringen mitgeliefert. Diese muss man in die 4 kleinen Löcher des Flightcontrollers stecken. Sie sollen ebenfalls vor Vibrationen schützen.
- Beim Befestigen des Flightcontrollers sollte man ebenfalls auf die Ausrichtung achten. Jeder Flightcontroller hat einen kleinen Pfeil auf der Oberseite. Wenn man den Flightcontroller richtig angebracht hat, dann sollte dieser Pfeil in die Flugrichtung, also zum Vorderteil der Drohne zeigen. Falls es aus praktischen Gründen nicht möglich sein sollte den Flightcontroller so zu positionieren (Weil zum Beispiel der seitliche Micro-USB Anschluss zur Verbindung mit dem Computer von irgendeinem Kabel verdeckt wird), dann kann man ihn auch verkehrt platzieren. Allerdings muss man dann später bei der Einrichtung der Firmware des Flightcontrollers die geänderte Rotation angeben.
- Der kleine Anschluss ist manch einem bestimmt bekannt. Es handelt sich um einen Micro-USB Anschluss, wie er auf häufig bei Smartphones zum Einsatz kommt. Mit diesem Anschluss kann man den FLightcontroller mit dem Computer verbinden. Aus diesem Grund sollte dieser Anschluss zur Seite gedreht sein. So hat man einfachen Zugang zu ihm, ohne jedes mal die Drohne auseinander bauen zu müssen.
- Deinen Receiver musst du ebenfalls gewissenhaft positionieren. Die Antenne/Antennen des Receivers dürfen nämlich nicht innerhalb des Frames platziert werden. Am besten sollten sie sogar etwas weiter vom Frame montiert werden (Signal verbessern). Ich verwende dazu kleine Kunststoff-röhrchen, welche ich an den Armen der Drohne befestige. Dadurch schütze ich die Antennen vor einem Aufprall und bringe sich gleichzeitig weiter vom Frame weg ,wodurch die Signalstärke und Reichweite verbessert werden.
- Hier ist Kreativität gefragt. Ich habe meinen Receiver unter den Batterie-Kabeln befestigt und seine Kabel nach oben durchgeführt. Die beiden Antennen habe ich auf der Unterseite der Bodenplatte herausgeführt.
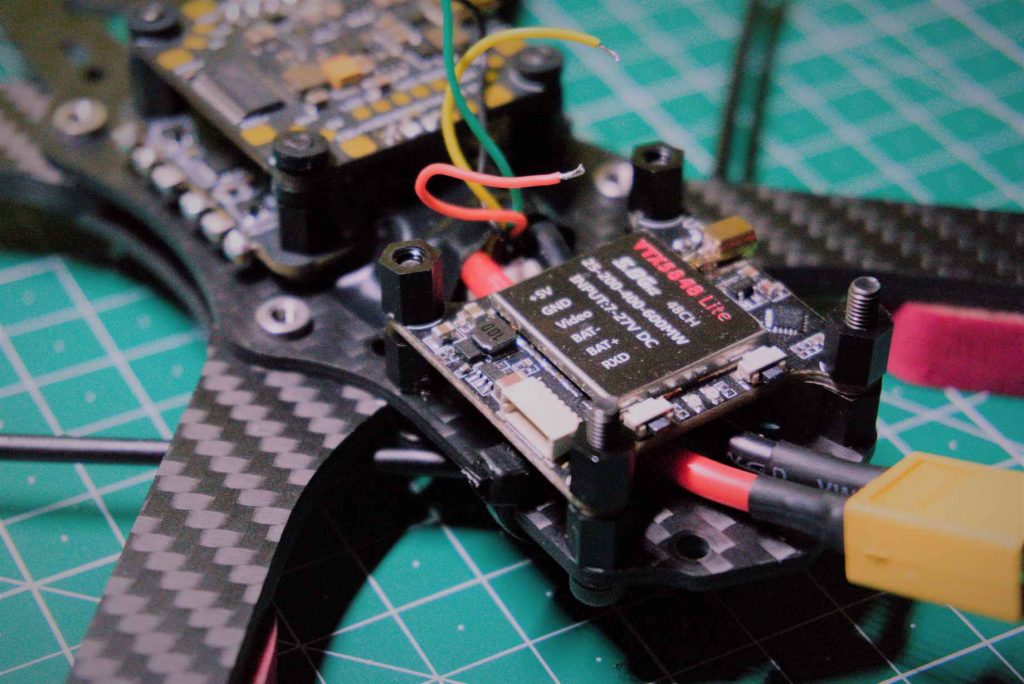
- Falls dein Video-transmitter ebenfalls Löcher zum Montieren hat, dann kannst du diesen, wenn genug Platz ist über den Flightcontroller stecken. Falls nicht genug Platz ist, dann kannst du im Hinterteil der Drohne schauen, denn dort befinden sich meistens auch nochmal 4 Löcher zum Montieren von Teilen.
- Falls weder dein Video-Transmitter noch deine Drohne Löcher zur Montage haben sollten, dann musst du ihn mit Kabelbinder oder ähnlichem befestigen. Achte auch darauf, dass du noch eine Antenne an ihn anschließen musst. Er sollte also so platziert sein, dass du ohne Probleme eine Antenne anschließen kannst. Die Antenne darf nicht im Frame sein, sondern muss außerhalb sein (ansonsten ist das Signal sehr schlecht). Der Videotransmitter sollte mit Abstandshaltern angebracht werden und sollte keinen direkten Kontakt zu anderen Bauteilen haben, da er sich stark erwärmen kann.
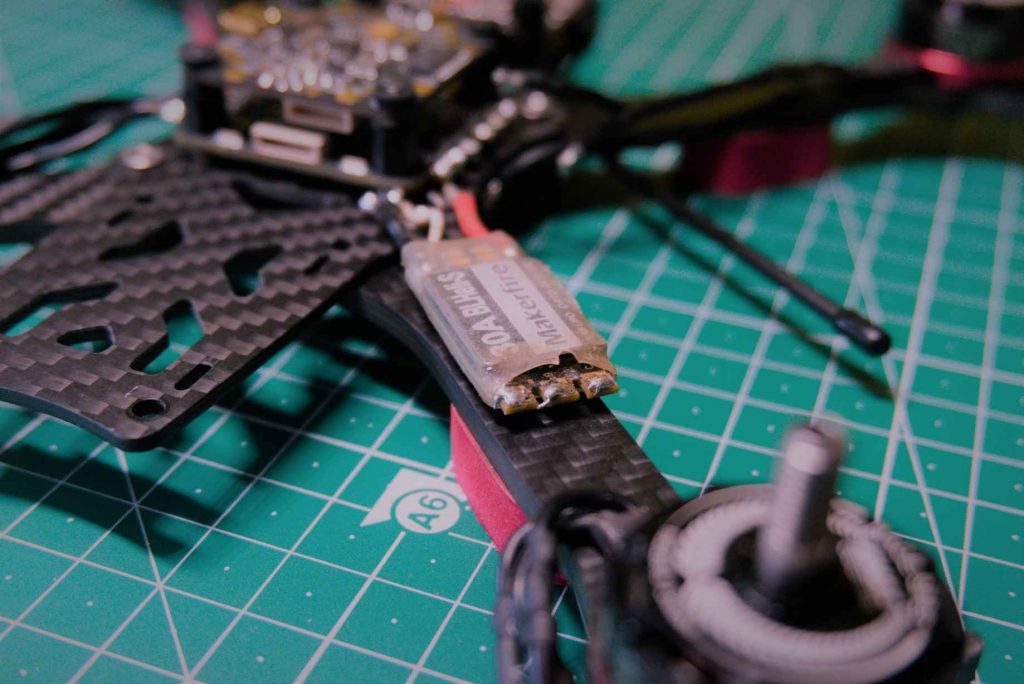
5. Schritt - Motoren befestigen:
- In diesem Schritt bringen wir die Motoren an.
- Zuerst müssen wir die Kabel der Motoren aber auf die richtige Länge bringen. Dazu positionierst du sie einfach am Ende der Arme und schaust, ob du sie ohne Problem ESC anlöten kannst. Wenn sie zu kurz sind, dann kannst du sie verlängern, indem du einfach ein weiteres Kabel als Verlängerung anlötest und den Kontakt mit einem Schrumpfschlauch abisolierst. Zu lange sollten die Kabel aber auch nicht sein, weil sie beim Flug sonst bewegen können und möglicherweise in die Propeller kommen. Außerdem ist der Widerstand bei längeren Kabeln höher, wodurch die Effizienz der Drohne leidet.
- Wenn alle Kabel die richtige Länge haben, isolierst du etwa 0.5cm der Kabelenden ab und trägst eine dünne Schicht Lötzinn auf.
- Auch auf die Lötstellen des ESC’s muss eine Schicht Lötzinn aufgetragen werden (im vorherigen Schritt schon erledigt).
- Als nächstes werden die Motoren am Frame befestigt. Dazu setzt du den Motor an das Ende des Arms und schraubst von der Unterseite des Arms 4 kleine Schrauben durch den Frame und in den Motor. Achte unbedingt darauf, dass die Schrauben nicht zu lang sind, weil sie ansonsten zu weit in den Motor gedreht werden und möglicherweise die Windungen beschädigen. Optional kannst du zwischen Frame und Motor auch noch eine kleine Gummiplatte legen. Dies kann eine Übertragung von Vibrationen des Motors auf den Frame verhindern.
- Motoren haben ein Gewinde, auf welches man später die Mutter zur Befestigung des Propellers schraubt. Manche Motoren haben ein CW (Clockwise = Uhrzeigersinn) und andere ein CCW(Counter Clockwise = gegen Uhrzeigersinn) Gewinde. Falls deine Motoren unterschiedliche Gewinde haben (also 2 Motoren CCW und 2 Motoren CW) haben, dann müssen sich die Motoren mit gleichem Gewinde immer diagonal gegenüber sein. Wenn deine Motoren alle dasselbe Gewinde haben, dann ist es egal wie du sie platzierst.
- Wenn alle Motoren fest sind, kannst du die Kabel der Motoren am ESC befestigen. Es ist egal wo du welches Kabel anlötest. Das wird erst später wichtig, wenn wir die Drehrichtung der Motoren überprüfen. Es macht Sinn das Kabel beim Löten mit einer Zange zu halten anstatt mit den Fingern, weil es sich beim Löten stark erhitzt. Manchmal muss man mehrere Sekunden auf die Lötstelle einwirken, bis das Lötzinn vollständig verflüssigt ist.
- Die Motoren können später noch mit Kabelbinder oder ähnlichem am Frame befestigt werden. Damit warten wir aber noch, weil wir die Kabel zum Teil vielleicht noch umlöten müssen (je nachdem ob die Drehrichtung der Motoren stimmt)
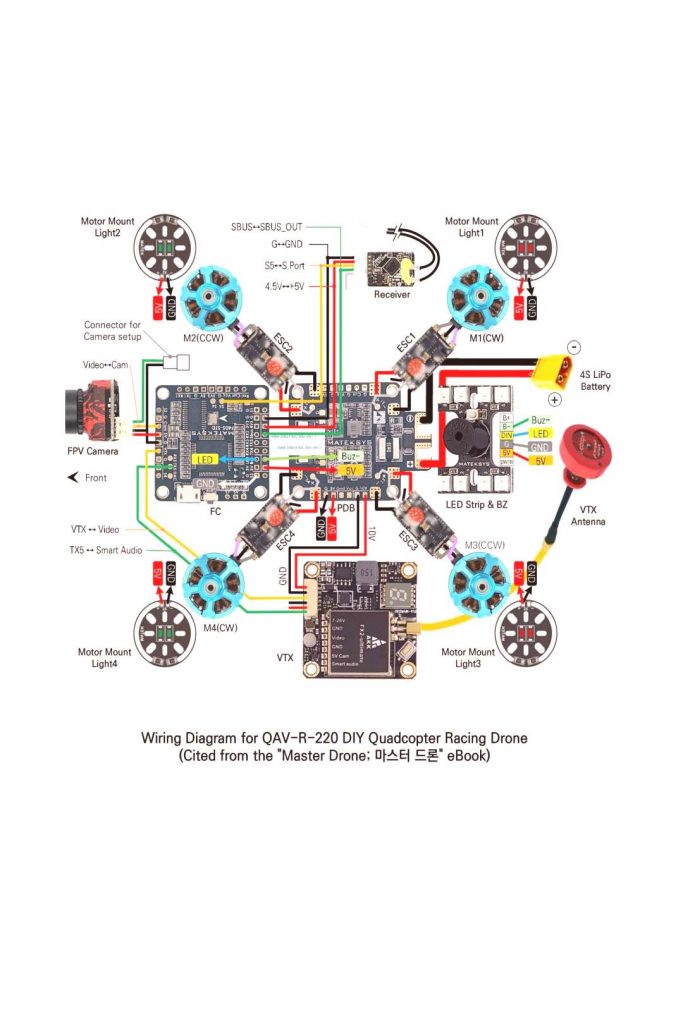
6. Schritt - Verkabelung der Elektronik:
- In diesem Schritt werden alle Komponenten miteinander verkabelt. Die folgenden Schritte können sich bei dir stark unterscheiden. Schaue in die Anleitungen deiner Teile wo welche Kabel hinmüssen. Du kannst aber gerne meine Anleitung verfolgen, einige Schritte sind sicherlich ähnlich oder gleich.
- Mein ESC lässt sich mit einem einzigen Stecker mit dem Fightcontroller verbinden. Ich muss also nicht manuell Kabel anlöten, was einiges an Arbeit spart.
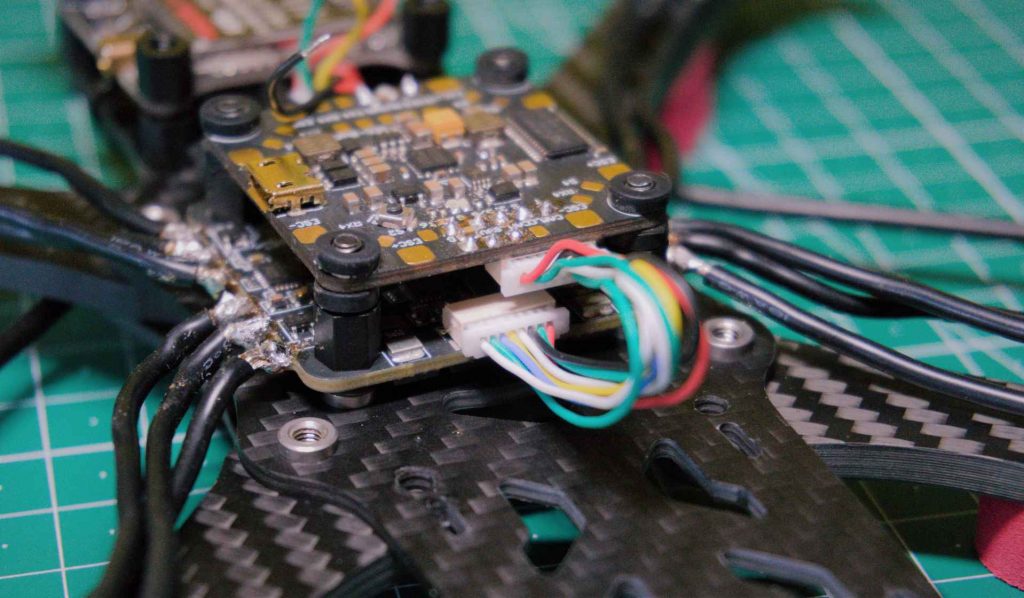
- Im nächsten Schritt verbinde ich den Video-Transmitter mit meinem Flightcontroller.
- Ich muss lediglich 3 Kabel verlöten. Zwei zur Stromversorgung und eins zur Videoübertragung. Es kann aber gut sein, dass du mehr Kabel hast (z.B. für ein OSD).
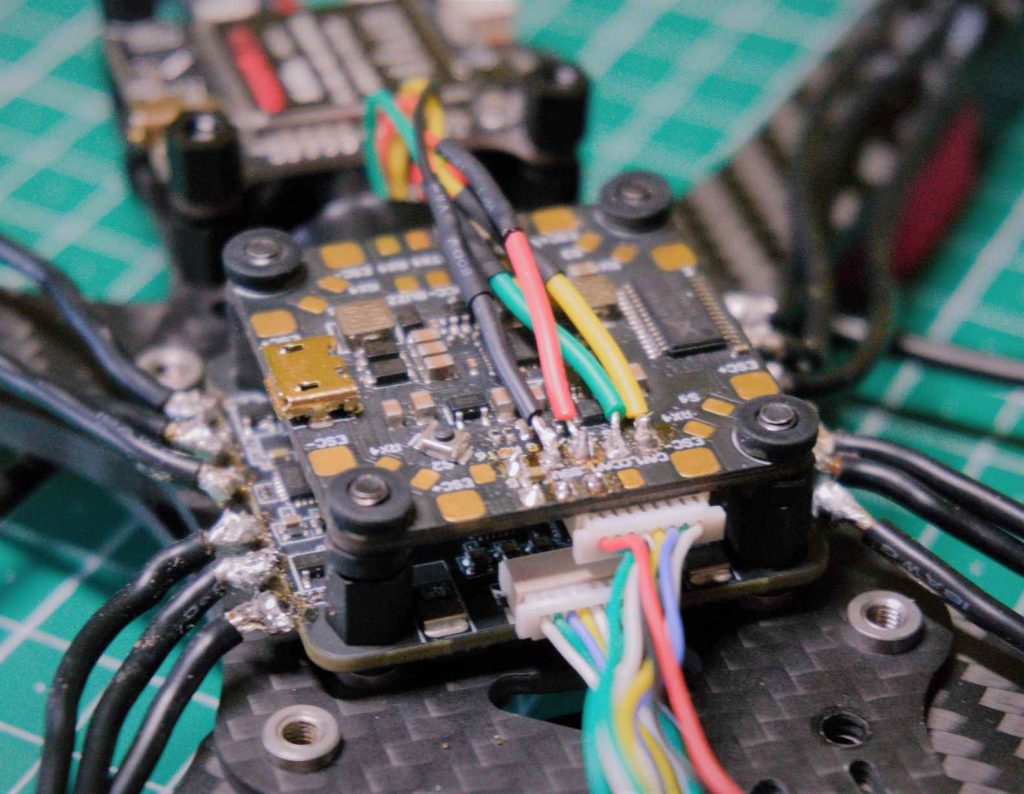
- Meinen Receiver schließe ich mit 4 Kabeln am Flightcontroller an.
- Zwei Kabel zur Stromversorgung (positiv und negativ), ein Kabel zur Signalübertragung und ein Kabel für Telemetrie.
- Nicht jeder Receiver hat Telemetrie. Wenn du also nur 3 Kabel hast, dann ist das auch kein Problem.
- Der Bardwell FC hat einen speziell markierten UART für den Receiver. Generell kannst du aber jeden UART am Flightcontroller verwenden (schau einfach in die Anleitung deines Fightcontrollers, welche Lötstelle dafür vorgesehen ist).
7. Schritt - Kamera einbauen (Kamerahalterung bauen):
- Diesen Schritt hättest du womöglich schon früher machen können. Bei meinem Frame macht es jedoch Sinn die Kamera erst recht spät einzusetzen.
- Ich beginne mit dem Zusammenbauen der FPV-Kamera Halterung.
- Das ist noch relativ leicht. Hier müssen einfach drei Teile zusammengesteckt werden und mit 4 Schrauben befestigt werden. Wo was reingesteckt wird ist eigentlich meistens ziemlich eindeutig.
- Die Kamera muss in die Mitte und mit zwei Schrauben links und rechts befestigt werden. Ich fixiere meine Kamera hier auf einfachste Weise. Man kann sich auch Kamerahalterungen kaufen oder weitere Schrauben eindrehen, um den Winkel der Kamera fest einzustellen.
- Die Kamerahalterung muss auf die Bodenplatte des Frames gesteckt werden. Bei mir ist das etwas knifflig, weil die Kamerahalterung an der Deckenplatte befestigt ist. Deswegen habe ich auch bis jetzt mit dem Einbau gewartet.
- Auch die Kamera muss verkabelt werden. Ich benötige nur drei Kabel.
- Zwei zur Stromversorgung und eins zur Videoübertragung.
- Manchmal verbindet man Kamera und Video-Transmitter direkt. Ich verbinde aber meine Kamera in einem Zwischenschritt mit dem Flightcontroller, weil meinem Videofeed dort das OSD hinzugefügt wird.



8. Schritt - Flightcontroller einrichten und Komponenten testen:
Flightcontroller Firmware Flashen:
Die Firmware ist das was den Flight Controller von den meisten anderen Bauteilen abhebt. Man verkabelt ihn nicht einfach und fliegt dann los. Vorher müssen erst noch wichtige Konfigurationen vorgenommen werden.
Das erste was man generell tun sollte, wenn man sich einen neuen Flight Controller zugelegt hat, ist die aktuellste Firmware aufzuspielen. Dazu muss man erstmal in Erfahrung bringen welche Firmware man überhaupt flashen muss/will. Mittlerweile hat man nämlich die Qual der Wahl, weil es mehrere verschiedene Firmwares gibt. Die Gängigsten sind Betaflight, Cleanflight, Raceflight und KISS. Betaflight und Cleanflight wird von den meisten Flight Controllern unterstützt. Raceflight und KISS hingegen werden nur von einer Hand voll Flight Controllern unterstützt. Des Weiteren gibt es noch leicht abgeänderte Firmwares. Zum Beispiel Butterflight, welches eigentlich nur eine kleine Modifikation von Betaflight ist. Generell ist Betaflight eine sehr gute Wahl.
Die folgende Erklärung ist speziell für Betaflight.
Als erstes musst du dir den Betaflight-Konfigurator herunterladen. Auf dieser Seite ganz nach unten scrollen und die passende Datei für das eigene Betriebssystem herunterladen.
Anschließend Betaflight öffnen und den Flightcontroller an den Computer anschließen. Anschließend links auf den Reiter „Firmware Flasher“ klicken.
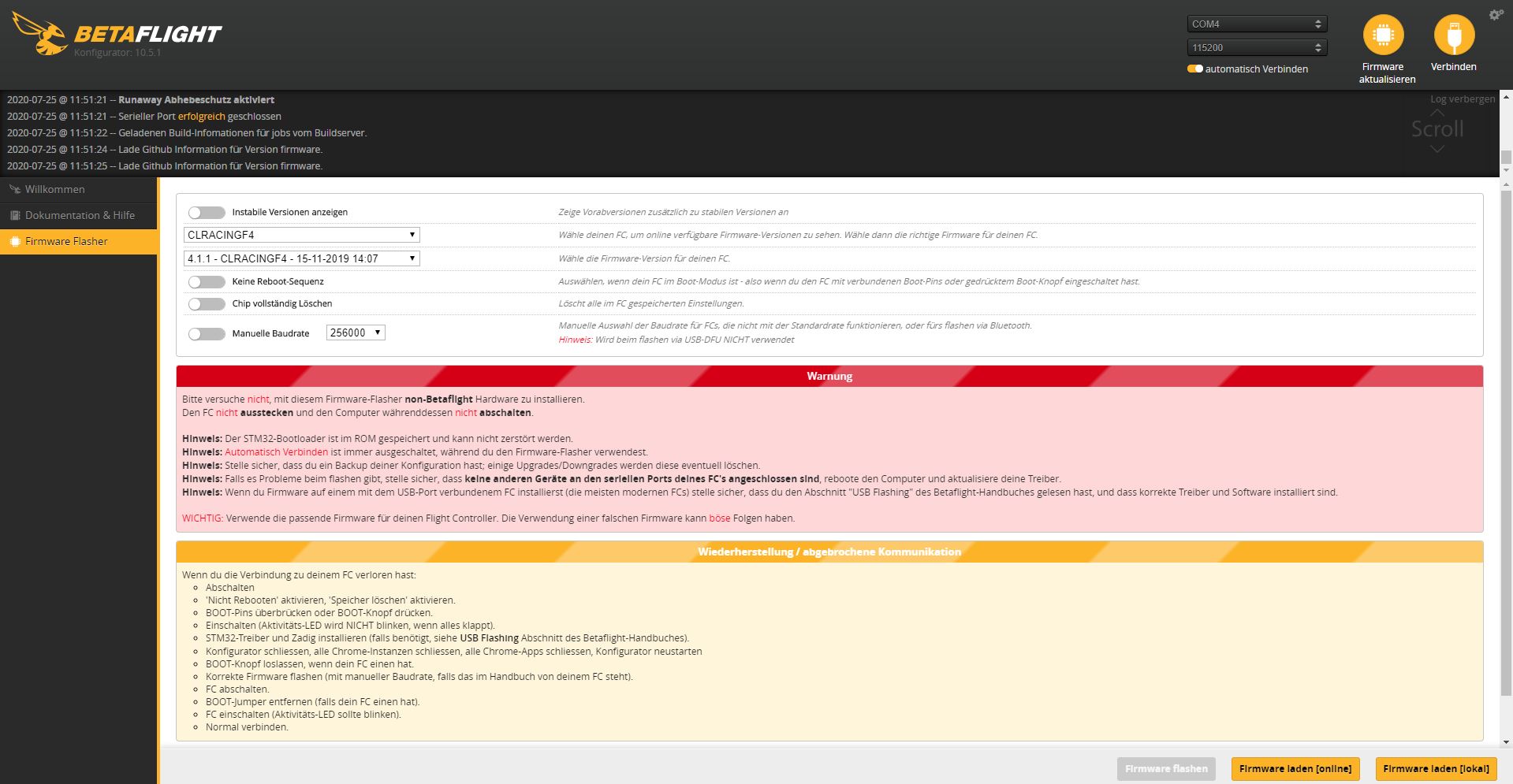
Normalerweise müsste bei Board und Firmware jetzt automatisch die richtige Konfiguration ausgewählt sein. Wenn nicht, dann musst du das manuell tun. Die anderen Schalter solltest du am Anfang nicht aktivieren (außer du weißt was du tust).
Nun musst du auf „Firmware laden [online]“ drücken und wenn das Programm alle Daten zusammen hat, dann kannst du auf Flash Firmware drücken.
Danach sollte die Firmware wenn alles geklappt hat auf dem Flight Controller sein. Du kannst dann mit den Einstellungen des Controllers fortfahren, indem du oben rechts auf „Verbinden“ drückst.
Flightcontroller konfigurieren/einstellen:
Im Folgenden werde ich durch alle Schritte gehen, welche nötig sind, um deinen Flightcontroller vollständig zu konfigurieren. Die Konfiguration ist sehr umfangreich und kostet Zeit. Stelle also sicher, dass du mindestens eine Stunde zur Verfügung hast. Bitte sei nicht enttäuscht, wenn nicht alles von vorne rein funktioniert. Das ist völlig normal.
Bitte beachte auch, dass diese Konfiguration eine bereits vollständig zusammengebaute Drohne voraussetzt. Wenn die Motoren beispielsweise noch nicht angelötet sind, dann kannst du einen Teil der Konfiguration noch nicht machen.
ENTFERNE BEVOR DU ANFÄNGST ALLE PROPELLER -> DIE KONFIGURATION KANN FALSCH AUSGEFÜHRT ZU FEHLFUNKTIONEN FÜHREN UND MIT ANGEBRACHTEN PROPELLERN ZU SCHWEREN VERLTZUNGEN FÜHREN!
Backup: Bevor man anfängt Konfigurationen vorzunehmen, macht man normalerweise erstmal ein Backup der Einstellungen. Das kann sehr nützlich sein, weil die Hersteller manchmal (vor allem bei Ready to Fly Modellen) bereits passable Standarteinstellungen getätigt haben. Wenn man jetzt selbst mit allen möglichen Einstellungen rumspielt, dann kann es passieren, dass man hinterher eine schlechtere Konfiguration hat. Mit einem Backup verliert man so wenigstens die Standartkonfiguration nicht.
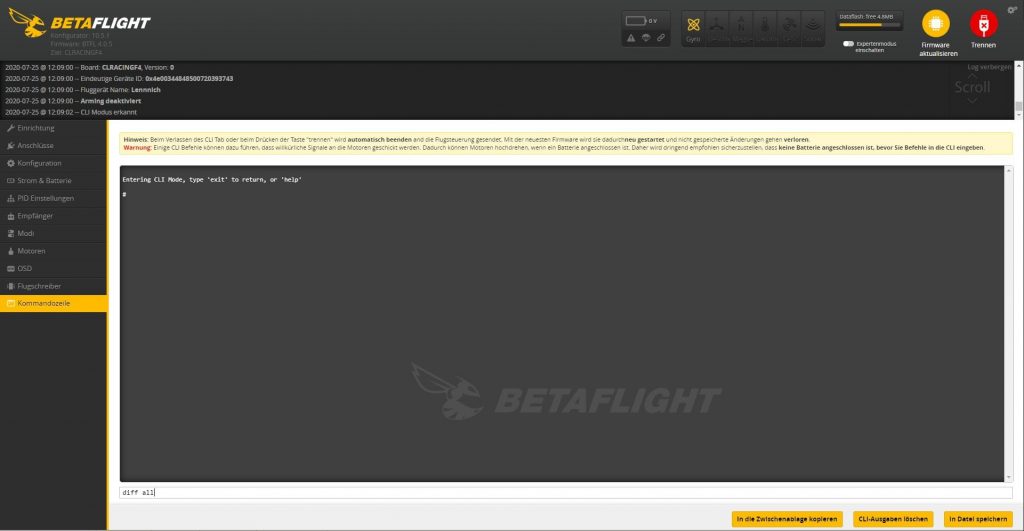
- FC and Computer anschließen und auf verbinden drücken
- Aus der Liste links den Tab „Kommandozeile“ wählen (meist ganz unten)
- In das Eingabefeld den Befehl „diff all“ eingeben
- Auf den Button „In Datei speichern“ klicken
- Fertig
Receiver mit FC verbinden: Der Receiver empfängt Signale vom Transmitter und leitet diese weiter an den Receiver. Als erstes muss man den Receiver mit dem Flightcontroller verlöten. Dabei verlötet man das Signalkabel des Receivers mit einem der UART’s des Flugreglers. Man muss hier auf Besonderheiten des eigenen Flighcontroller‘s achten. Am besten lädt man sich vorher eine Anleitung zum FC aus dem Internet herunter. Wenn alles verlötet ist, dann muss man den Receiver mit dem Transmitter „pairen“. Dazu schaust du einfach in die Anleitung deines Receivers. Meist muss man einen Knopf für ein paar Sekunden gedrückt halten, während man den Transmitter anschaltet. Anschließend muss man den Flightcontroller per Computer noch mit dem Receiver verbinden (Software einstellen).
- Flightcontroller an Computer anschließen und auf „Verbinden“ drücken.
- Links den Tab „Anschlüsse“ auswählen und bei dem UART auf welchen man das Signalkabel gelötet hat den „Serieller Empfänger“ Schalter umlegen. (Wenn du nicht sicher bist welcher UART das ist, dann musst du auf deinem FC nachschauen. Die Pins sind meistens nummeriert. Wenn du also dein Signalkabel an beispielsweise „RX2“ angeschlossen hast, dann musst du den UART 2 als „Serieller Empfänger“ ankreuzen.
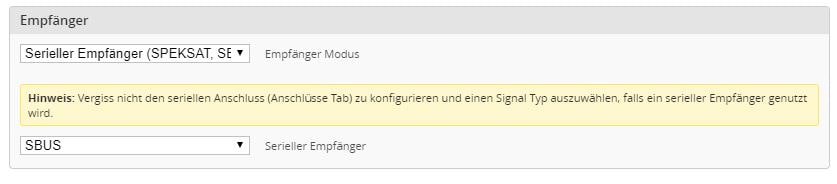
- Links den Tab „Konfiguration“ wählen und ein wenig runterscrollen bis zu den Einstellungen zu „Empfänger“.
- Dort musst du dann den Empfänger-Modus wählen. Wenn du nicht weißt welchen Empfänger-Modus du hast, dann musst du einfach die Produktbeschreibung deines Receivers durchlesen. Dort steht alles.
Ein kleines Stück unten drunter musst du noch den Seriellen Empfänger wählen. Auch hier kannst du in der Produktbeschreibung deines Receivers nachschauen.

- Links den Tab „Empfänger“ wählen. Wenn du jetzt deinen Transmitter anmachst und die Sticks bewegst kannst du hier sehen, ob der Flightcontroller die Signale empfängt. Bei manchen Receivern reicht es nicht, dass die Drohne per USB am Computer angeschlossen ist. Du musst sie manchmal direkt per Akku mit Strom versorgen, dass der Receiver funktioniert. Bitte schraube dazu vorher alle Propeller ab.
- Jetzt solltest du sehen, dass sich die einzelnen Balken bewegen, wenn du die Sticks an deinem Transmitter bewegst.
Die Balken links sind alle beschriftet. Die ersten vier sind Roll, Pitch, Yaw und Throttle. Man kann seinen Transmitter nach den eigenen Bedürfnissen belegen.
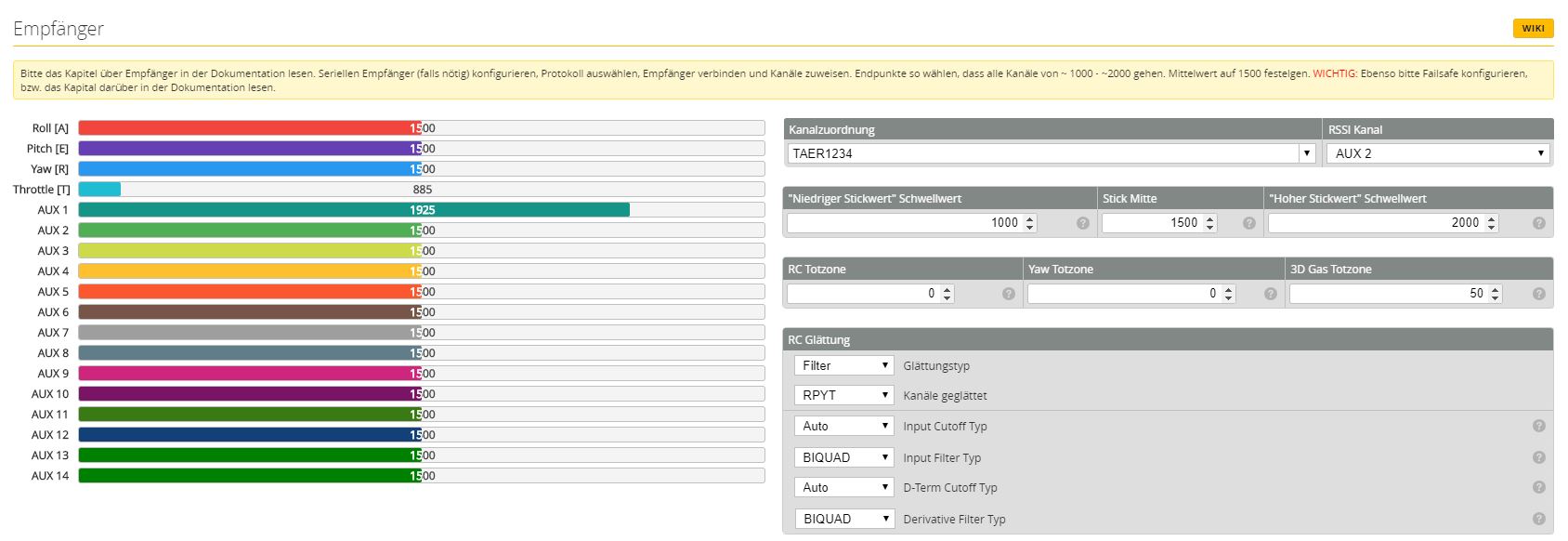
Man spricht auch von den Stick-Modes. Hier geht es lediglich um die persönliche Präferenz. Hier mal die beiden meist verwendeten Modes:
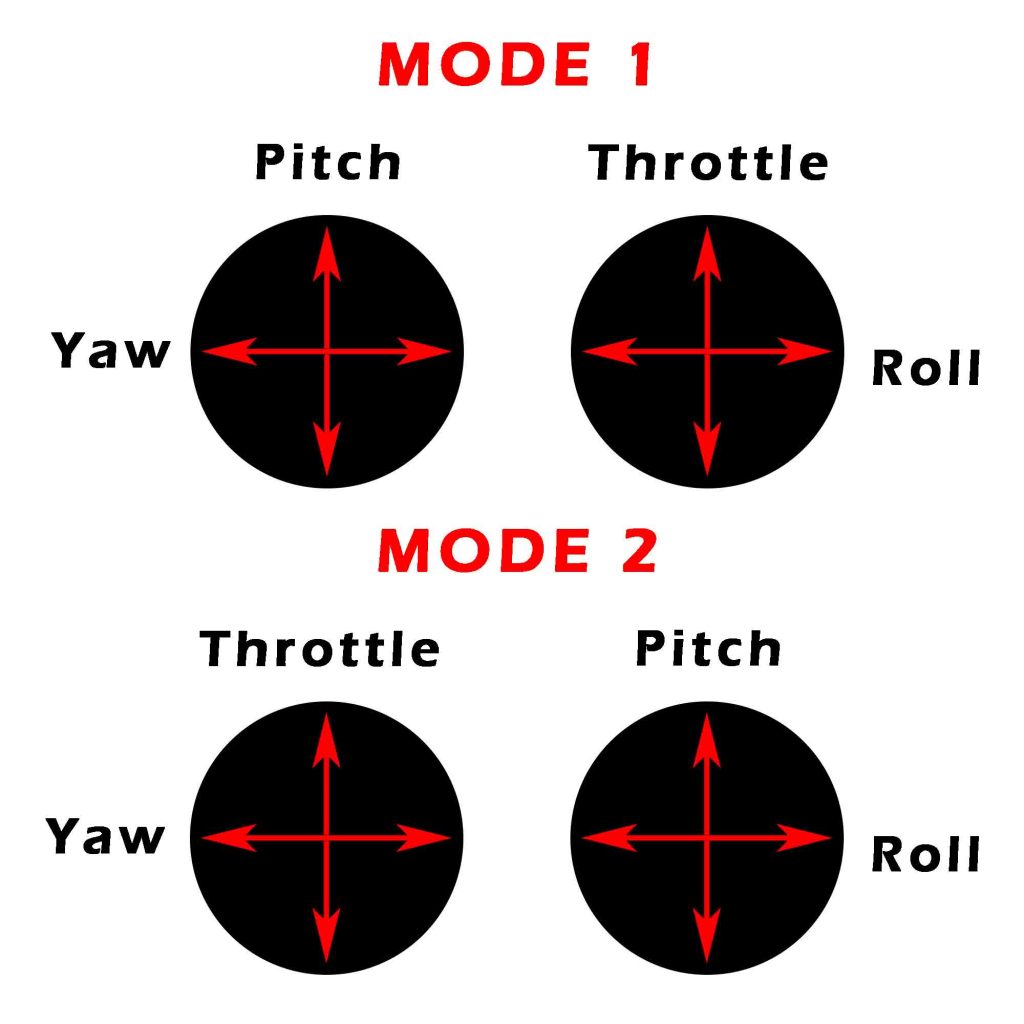
Je nachdem welchen Mode man bevorzugt muss man jetzt schauen ob sich die jeweils richtigen Balken bewegen, wenn man die jeweiligen Sticks am Transmitter bewegt. Wenn ich beispielsweise Mode 2 wähle, dann sollte sich der Balken „Throttle“ bewegen, wenn ich den linken Stick nach oben und unten drücke.
Falls die Belegung nicht stimmen sollte, dann kann man rechts bei „Kanalzuordnung“ eine andere Zuordnung wählen. Einfach den Pfeil nach unten drücken und das passende auswählen. Falls nicht das Passende dabei ist, dann kann man auch einfach die Reihenfolge der Buchstaben „AERT“ ändern.
- Unten rechts auf „Speichern“ drücken
- Fertig
Arm-Switch und andere Funktionen konfigurieren: Der Arm-Switch bezeichnet einen Schalter an deinem Transmitter, welcher dazu dient deine Drohne bzw. die Motoren deiner Drohne einzuschalten. Der Grund hierfür ist, dass Propeller und Drohnen generell sehr gefährlich sein können. Man möchte auf keinen Fall, dass man ausversehen losfliegt und sich oder jemand anderen verletzt. Wenn die Drohne nicht „gearmt“, also scharfgeschalten ist, dann passiert nichts, wenn man an der Fernbedienung die Sticks bewegt. Wenn man aber den Arm-Switch umlegt, gehen die Motoren an und die Drohne reagiert auf den Input vom Transmitter. Außerdem kann man mit dem Arm-Switch die Drohne und die Motoren ausschalten, wenn man abgestürzt ist. Dadurch drehen sie sich nicht weiter, wodurch das Verletzungsrisiko und das Beschädigungsrisiko der Drohne sinken.
- Man muss sich überlegen welchen Schalter man am Transmitter verwenden möchte. Möglicherweise muss man am Transmitter diesem Schalter einen Channel zuweisen (Am besten in die Anleitung des Transmitters schauen)
- Flightcontroller an Computer anschließen und auf verbinden drücken
- Link bei den Tabs „Empfänger“ auswählen
- Jetzt legt man den Schalter, welchen man als Arm-Switch verwenden möchte am Transmitter um. Nun sollte sich einer der Balken (AUX1 – AUX14) bewegt haben. Die Zahl des Balkens (Zahl welche hinter AUX steht) muss man sich jetzt merken
- Links bei den Tabs muss man jetzt „Modi“ auswählen
Dann klickt man bei „Arm“ auf „Bereich hinzufügen“ und wählt anschließend bei dem kleinen Drop-down-Menü das AUX mit der gemerkten Zahl hinten dran an.
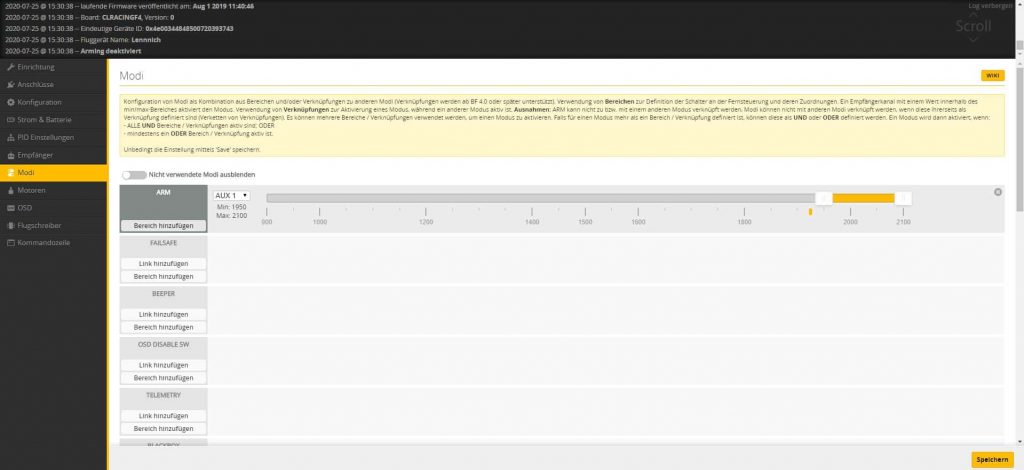
- Man kann jetzt mit dem Orangenen Balken einen Bereich einstellen, in welchem das Arming aktiviert und deaktiviert ist. Wenn man den Schalter beim Transmitter umlegt, dann sollte der kleine Zeiger im orangenen Bereich liegen. Wenn man den Schalter wieder in seine Ausgangsstellung schiebt, dann sollte der kleine Anzeiger im grauen Bereich sein.
- Du kannst jetzt noch andere Modi auf dieselbe Weise konfigurieren. Beispielsweise „AngleMode“. Der Arm-Switch ist aber die einzige Funktion, welche absolut notwendig ist.
- Unten rechts auf „Speichern“ drücken
- Fertig
Motoren einrichten: Bei diesem Schritt ist besondere Vorsicht geboten. Entferne hier auf jeden Fall die Propeller. Durch kleinste Fehler könntest du dich mit angeschraubten Propellern schwer verletzen!
Wenn etwas nicht klappt, dann entferne den Akku während du nach einer Lösung schaust. Eine Drohne kühlt sich durch den Flugwind. Ein angeschlossener Akku kann bei Stillstand nach längerer Zeit für eine Überhitzung verschiedener Komponenten führen.
- Propeller abnehmen (wichtigster Schritt!!!)
- Drohne mit Computer verbinden und auf „Verbinden“ drücken
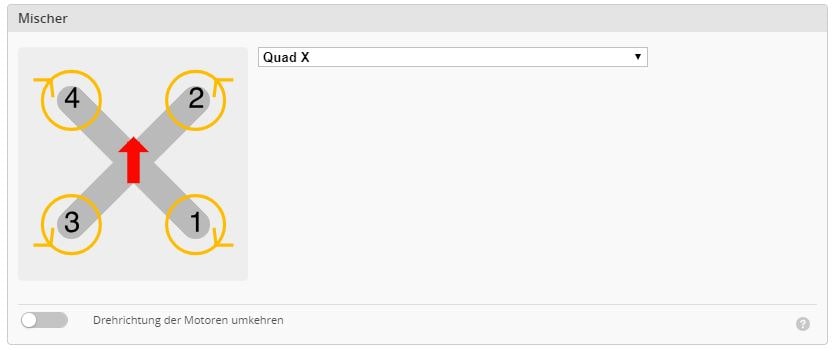
- Links den Tab „Konfiguration“ auswählen. Dort muss man links beim „Mischer“ die Form seiner Drohne auswählen. Bei den meisten wird das „Quad X“ sein.
Anschließend macht man sich am besten mit dem Smartphone ein Bild von der Darstellung. Diese verrät einem nämlich, in welche Richtung sich die einzelnen Motoren drehen sollten.
- Rechts bei „ESC / Motor Funktionen“ muss man noch das passende ESC-Protokoll wählen. Wenn man nicht weiß welches Protokoll das Passende ist, dann muss man einfach im Internet (zum Beispiel Banggod /Amazon oder direkt beim Hersteller) nachschauen, was in der Produktbeschreibung steht
- Unten rechts auf „Speichern“ drücken
- Akku an Drohne anschließen
- Links den Tab „Motoren“ auswählen
- Rechts bei der kleinen weißen Box den Schalter bei „Ich weiß was ich mache“ umlegen (Nur umlegen, wenn man die Propeller abgemacht hat)
- Den Master-Switch für kurze Zeit leicht anheben. Jetzt sollten sich alle Motoren drehen. Wenn sie sich nicht drehen, dann kannst du links den Tab „Konfiguration“ auswählen und rechts bei „ESC / Motor Funktionen“ den Wert für „Motor Leerlauf Gas Wert [Prozent] leicht erhöhen
- Um zu überprüfen, ob sich die Motoren in die richtige Richtung drehen, ist es empfehlenswert einen kleinen Klebestreifen oben am Motorschaft anzubringen. Wenn sich die Motoren jetzt alle drehen, wird es dadurch leichter die Drehrichtung zu erkennen. Man gleicht jetzt die Drehrichtung jedes Motors mit der Abbildung von vorhin ab. Wenn ein Motor sich in die falsche Richtung dreht, dann notiert man das
- Akku entfernen
- Bei allen Motoren, welche sich jetzt in die falsche Richtung gedreht haben, muss man zwei der drei Kabel vertauschen. Es ist dabei völlig egal welche beiden Kabel man vertauscht. Wenn fertig nochmal ab Punkt 7 die Anleitung durchgehen.

- Unten rechts auf „Speichern“ drücken
- Fertig
Testen: Wenn du die Schritte oben befolgt hast und alles soweit geklappt hat, dann bist du theoretisch mit den Basics fertig.
Du kannst jetzt testen ob alles geht.
- Drohne nicht mit Computer verbinden (Kabel entfernen)
- Sicherstellen, dass keine Propeller angebracht sind
- Transmitter anmachen
- Akku anschließen
- Arm-Switch umlegen (Motoren sollten drehen) und die Sticks des Transmitters bewegen (Motoren sollten Reaktion zeigen)
- Fail-safe Test durchführen!!! Failsafe ist ein Protokoll, welches deine Drohne aktiviert, wenn sie den Funkkontakt zu deinem Transmitter verliert. Bei einem Verbindungsabbruch schalten sich normalerweise nach etwa einer Sekunde die Motoren ab. Dadurch wird verhindert, dass deine Drohne wegfliegt, falls du die Verbindung zu ihr verlierst.
Um zu testen ob Failsafe funktioniert schaltest du einfach deinen Transmitter aus, während sich die Motoren drehen (natürlich ohne angebrachte Propeller). Wenn die Motoren nach einer Sekunde oder weniger aufhören sich zu drehen, dann ist alles gut. Falls es länger dauert, sie gar nicht aufhören zu drehen oder gar schneller werden musst du unbedingt die Fail-Safe Einstellungen bearbeiten. Verbinde dazu deine Drohne mit einem Computer, wähle „Verbinden“, aktiviere oben den Schalter „Expertenmodus einschalten“ und gehe anschließend links zum Tab „Failsafe“
- Wenn alles funktioniert bist du fertig mit der Konfiguration deines Flightcontrollers und kannst deinen Frame fertigstellen.
9. Schritt - Frame fertig bauen und letzte Anpassungen:
- Wenn das alles erledigt ist, kann man die Kabel noch mit Kabelbinder am Frame befestigen und andere Kleinigkeiten erledigen, wie die Kabel im Innenraum mit Kabelbinder ein wenig „aufzuräumen“.
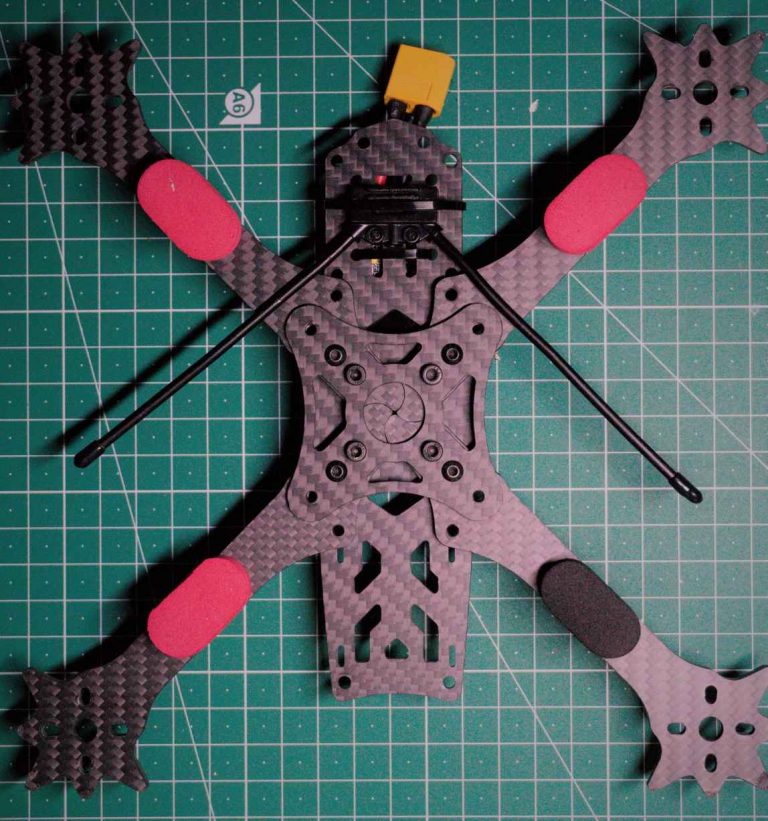
- Auch sehr empfehlenswert ist das Anbringen von kleinen Schaumstoffstützen unten an der Drohne (bei mir schon von Anfang an dran). Diese verhindern Beschädigungen an der Unterseite und machen das Landen bequemer. Man muss sie einfach nur aufkleben.
- Als letztes muss man noch das Oberteil der Drohne anbringen. Dazu befestigt man mit Schrauben erst die kleinen Stützpfosten am Bodenteil. Anschließend wird das Oberteil aufgesetzt und angeschraubt.
- Zu guter Letzt kann man noch die Video-Transmitter-Antenne anbringen.

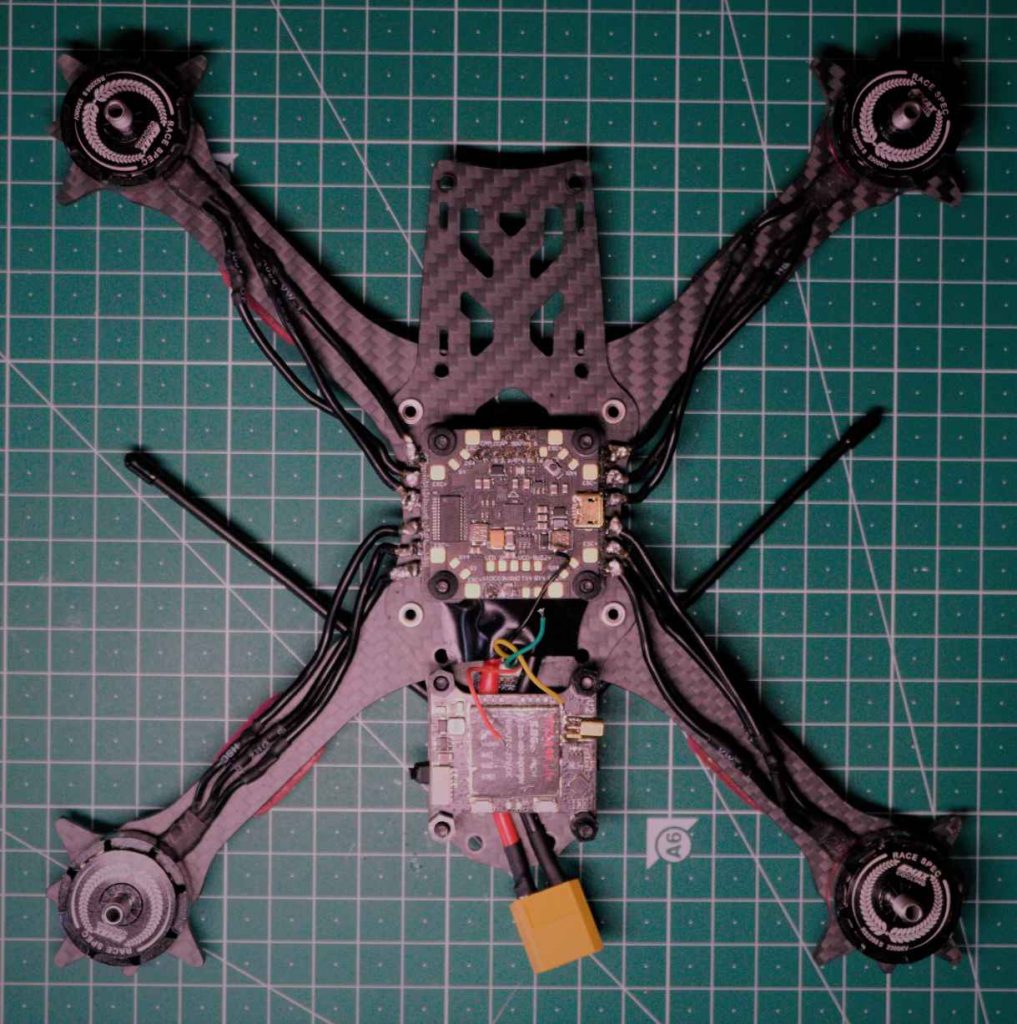
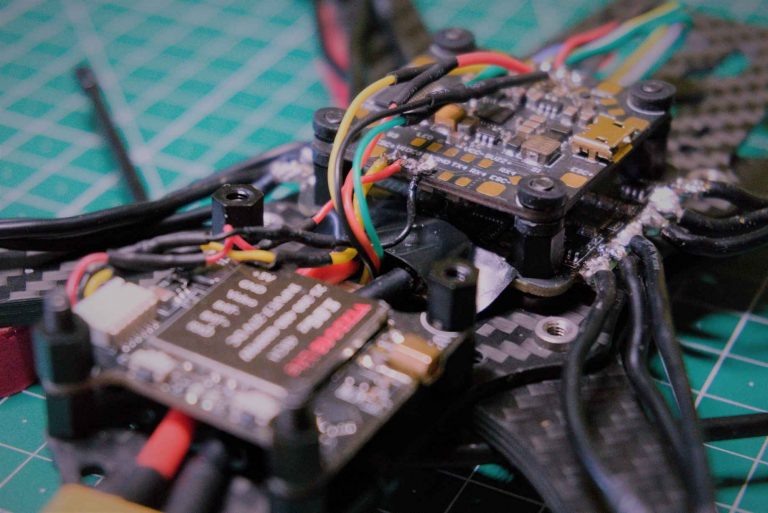
10. ENDLICH FERTIG:
Nachdem du nun die letzten Stunden, vielleicht auch Tage, damit verbracht hast deine eigene Drohne zu bauen, bist du nun endlich fertig und kannst fliegen. Ich wünsche dir viel Spaß! Meine Drohne sieht fertig gebaut übrigens so aus:

Mögliche Probleme/Fragen (FAQ)
Sind selbstgebaute Drohnen schlechter als Drohnen die man kaufen kann?
DIY und selber machen verbinde ich persönlich häufig mit meist eher schlechterer Qualität. Eigentlich logisch. Wenn ich etwas selber mache, dann kann das doch nur schlechter sein, als wenn ein Team von 1000 Leuten ein Produkt hautberuflich entwickelt oder?
Naja ganz so ist das nicht. Ich vergleiche das Bauen einer Drohne gerne mit dem Zusammenbauen eines Computers. Man baut die einzelnen Bauteile nicht selbst. Man steckt (lötet) sie eigentlich nur zusammen. Das ist wie Lego nur etwas komplizierter. Das Endergebnis ist eine stabile Drohne mit hoffentlich hochwertigen Teilen, die genau das tut wofür man sie gebaut hat.
Die Drohnen von großen Firmen wie DJI, Parrot oder Yuneec sind meistens für schöne Videoaufnahmen ausgelegt. Diese Drohnen haben ausgefeilte Designs und können meist filmreife Aufnahmen machen. Selbstgebaute Drohnen haben einfach nicht diesen Feinschliff. Das bedeutet aber nicht, dass die Qualität schlechter ist. Kohlefaserrahmen, welche man zum Bauen von Drohnen verwendet, sind zum Beispiel um einiges stabiler als ein Rahmen aus Plastik, wie man in häufig bei Drohnen findet, welche man fertig kaufen kann. Darüber hinaus kann man selbstgebaute Drohnen auf die eigenen Bedürfnisse und individuellen Wünsche anpassen. Wenn ich eine Kameradrohne bauen will, dann kann ich mit Sicherheit eine Drohne bauen, die genauso gute Aufnahmen macht wie Markendrohnen. Wenn ich eine Drohne aus Spaß am Fliegen baue, dann wird diese Drohne mit Sicherheit nicht weniger Spaß machen, als eine gekaufte Markendrohne.
Die Drohnen von großen Marken haben aber natürlich immer die neusten Features wie beispielsweise selbstfliegende Kameradrohnen oder faltbare Drohnen. Man muss sich einfach genau überlegen was man von seiner Drohne will. Generell kann man aber nicht sagen, dass selbstgebaute Drohnen qualitativ schlechter sind.


Links abgebildet eine Markendrohne (DJI Phantom)
Rechts abgebildet eine selbstgebaute Drohne
Was bedeutet FPV und was ist eine FPV-Brille?
FPV ist eine Abkürzung und steht für „First Person View“. Das bedeutet auf Deutsch so viel wie „Sicht aus der Ich-Perspektive“. Im Themenfeld Drohne bezeichnet FPV eine Kameratechnologie. Dabei wird an eine Drohne eine Kamera montiert. Diese Kamera ist aber nicht in erster Linie dazu gedacht Aufnahmen zu machen. Stattdessen sendet sie ein Live-Video-Signal an einen Bildschirm oder eine FPV-Brille. Der Pilot schaut beim Fliegen also nicht seine Drohne an, sondern schaut auf den Bildschirm. Weil die Kamera an der Drohne nach vorne gerichtet ist, entsteht die Illusion, als würde man den Flug aus der Sicht eines kleinen Miniaturpiloten sehen, welcher in der Drohne wie einem Flugzeugcockpit sitzt.
Die FPV-Brille setzt man sich wie eine VR-Brille auf den Kopf. In ihr befinden sich meist zwei kleine Bildschirme auf denen dann das Live-Video angezeigt wird. Selbstverständlich kann man den Live-Broadcast auch auf einem normalen Bildschirm anzeigen, die FPV-Brille hat aber einige Vorteile. Dadurch, dass sie eng am Kopf anliegt kommt kein Licht rein und man kann selbst bei starker Sonneneinstrahlung alles gut erkennen. Des Weiteren sorgt sie für mehr Immersion beim Fliegen. Wenn du dich für FPV-Brillen interessierst, dann kannst du gerne genaueres in meinem Artikel, welchen ich extra dafür geschrieben habe durchlesen.



Woher weiß ich ob Bauteile oder Transmitter/Receiver miteinander kompatibel sind?
Ich kann auf meiner Webseite leider nicht die Kompatibilität zwischen allen möglichen Teilen auflisten. Das wäre zu viel Arbeit. Generell sind die meisten Teile miteinander kompatibel. Es gibt jedoch ein paar spezielle Fälle in welchen man auch Kompatibilität besonders Acht geben muss.
- Du kannst nicht jeden Akku an deine Drohne anschließen. Du musst überprüfen welche Eingangsspannung dein PDB und Flightcontroller voraussetzen.
- Nicht jeder Receiver ist mit jedem Transmitter kompatibel. Ein Transmitter von FrSky wird in den allermeisten Fällen nicht mit einem Receiver von Spektrum kompatibel sein. Du solltest dich bei den Webseiten der Hersteller informieren, welche Receiver mit welchen Transmittern kompatibel sind
- Du musst darauf achten, dass dein Akku genug Strom bereitstellen kann, um die Motoren mit Strom zu versorgen. Jeder Drohnenakku kann sehr große Mengen an Strom bereitstellen. Allerdings sind bei verschiedenen Akkus verschiedene Grenzen gesetzt, ab wann der Stromfluss zu groß bzw. schädlich oder gefährlich wird. Man muss also in Erfahrung bringen wieviel Strom der einzelne Motor maximal zieht. Dann multipliziert man diese Strommenge mit der Anzahl der Motoren und notiert sich das Ganze. In einer zweiten separaten Rechnung nimmt man die Kapazität des Akkus in Ah und multipliziert diesen Wert mit dem C-Rating des Akkus (Wer nicht weiß was das ist, hier ein Artikel). Wenn der Wert der zweiten Rechnung größer ist als der Wert der ersten Rechnung ist alles gut, wenn nicht, dann braucht man entweder weniger stromzehrende Motoren oder einen Akku, welcher mehr Strom bereitstellen kann.
- Der Frame deiner Drohne muss groß genug sein um deine ganzen Bauteile zu tragen. Normalerweise sollte kein Teil außerhalb der Drohne platziert werden (Ausnahme sind Antennen, Kamera und Akku)
Ist es schwer eine eigene Drohne zu bauen?
Kurze Antwort: Es geht. Eine Drohne zusammenzubauen ist viel Arbeit. Oft braucht man mehrere Tage, wenn man die Planung miteinberechnet. Wenn man es zum ersten Mal macht, dann kann es sich auch mal um 2-3 Wochen handeln. Das Zusammenbauen an sich birgt einige Tücken, weil es auf handwerkliches Geschick ankommt. Allerdings möchte ich dich nicht abschrecken. Zum Beispiel musst du keine wirklichen Vorerfahrungen im Bereich Elektronik haben um eine solche Drohne zu bauen. Du solltest zwar wissen was Spannung, Stromstärke und Leistung sind (wenn du das nicht weißt dann kannst du einfach schnell im Internet gucken, ist wirklich nicht schwer) aber du musst kein Elektrotechnikstudium in der Tasche haben. Ich vergleiche das Bauen einer Drohne gerne mit dem Zusammenbauen eines Computers. Man baut die einzelnen Bauteile nicht selbst. Man steckt (lötet) sie eigentlich nur zusammen. Das ist wie Malen nach Zahlen.
Wieviel kostet eine selbstgebaute Drohne?
Das kommt darauf an welche Vorstellungen du hast. Der Preis hängt voll und ganz von deinen Ansprüchen ab. Du kannst sehr billige Drohnen bauen aber auch unbezahlbar teure Drohnen. Im Durchschnitt ist meiner Erfahrung nach das Preisleistungsverhältnis von selbstgebauter Drohne zu Markendrohne leicht besser (sofern man das benötigte Werkzeug nicht mit in die Rechnung miteinbezieht). Wenn du eine gute und hochqualitative Drohne bauen möchtest, dann musst du je nach Größe in etwa zwischen 500€ und 900€ investieren.
Wie werden alle Teile verkabelt? Brauche ich Vorerfahrung in Elektronik?
Die Teile werden immer auf eine ähnliche Weise verkabelt. Normalerweise hat jedes Kabel seinen eindeutigen Platz. Die einzelnen Lötstellen sind immer beschriftet, sodass man direkt sieht wo was hinmuss. Natürlich sollte man sich ein Video auf YouTube anschauen, wie was verkabelt wird, damit man eine grobe Ahnung hat wo was hinmuss. Oft findet man auf den Homepages der Hersteller auch gute Dokumentationen.
Normalerweise läuft das so ab. Der Akku wird an das PDB angeschlossen (außer das PDB und der Flightcontroller befinden sich auf derselben Platine). Die ESC’s werden ebenfalls am PDB angeschlossen. Das PDB wird am Flightcontroller angeschlossen. Die Signalkabel der ESC’s werden am Flightcontroller angeschlossen. Die Kamera wird an den Flightcontroller und an den Videotransmitter angeschlossen. Der Receiver wird an den Flightcontroller angeschlossen. Manchmal gibt es hier Unterschiede, weil zum Beispiel ESC und PDB zusammengefasst auf einer Platine sind. Generell sollte man einfach auf der Herstellerseite vorbeischauen. Da sind die Teile oft noch einmal beschriftet und es wird meistens genau erklärt wo was angeschlossen wird. Man muss also nicht wirklich durchblicken. Die Verkabelung ist vergleichbar mit Malen nach Zahlen.
Ist es egal wie man die 3 Kabel der Motoren mit den ESC’s verbindet?
ACHTUNG: Wenn dein Motor nur zwei Kabel und keine drei hat, dann ignoriere was unten steht.
Die kurze Antwort ist Ja. Es ist egal. Man kann die drei Kabel beliebig anschließen. Die Art und Weise wie man die Kabel anschließt bestimmt die Drehrichtung der Motoren. Bei einem Quadrocopter (4 Motoren) müssen zwei Motoren nach links drehen und zwei nach rechts drehen. Normalerweise verkabelt man wahllos. Dann später, wenn alles verbunden ist, schließt man die Drohne an den Computer an und lässt die Motoren anlaufen. Dabei überprüft man die Drehrichtung. Diagonale Motoren sollten sich in dieselbe Richtung drehen. Zwei Motoren müssen sich im Uhrzeigersinn drehen und zwei Motoren gegen den Uhrzeigersinn. Bei einem Hexacopter müssen dann dementsprechend 3 Motoren im Uhrzeigersinn und 3 gegen den Uhrzeigersinn drehen. Normalerweise sieht man aber am Computer welche Motoren sich in welche Richtung drehen müssen. Dreht sich ein Motor in die falsche Richtung, dann lötet man zwei Kabel ab und vertauscht die Position (Es ist egal welche von den beiden Kabeln man ablötet). Oder man ändert die Drehrichtung in der Firmware über den Flightcontroller. Die erste Variante ist aber eigentlich einfacher und schneller.
Soll ich am Anfang eher billige Teile kaufen oder direkt auf hohe Qualität Wert legen?
Hierzu gibt es verschiedene Ansichten. Zum einen macht es keinen Sinn billige Teile zu kaufen. Sie sind nicht hochwertig, haben einen kürzeren Lebenszyklus, haben oft praktische Nachteile, sind teilweise gefährlich (billige Akkus) und kommen oft von dubiosen noname Firmen. Wenn du dir direkt hochwertige Teil kaufst, dann wirst du an deiner ersten Drohne mehr und länger Spaß haben. Falls dich FPV und Drohnen dann doch nicht packen, kannst du die Teile immer noch verkaufen, oder gleich die ganze Drohne. So ist man eigentlich finanziell ziemlich gut abgesichert. Wer billige Teile verwendet wird vielleicht am Ende sogar mehr bezahlen, weil man auf den Teilen sitzen bleibt. Aber auf der anderen Seite kann man als Anfänger beim ersten Drohnenbau einiges falsch machen und auch Teile beschädigen. Das ist eigentlich der einzige Grund warum es für einige besser ist erstmal günstigere Teile zu kaufen. Wenn man schon Vorerfahrungen mit Elektronik und Löten hat, dann gibt es eigentlich keinen Grund auf billige Teile zurückzugreifen.
Zur Verdeutlichung: Mit billig meine ich billig in einem „gesunden“ Rahmen. Zum Beispiel: Normalpreisige Motoren für Miniquads kosten im Schnitt zwischen 15€ und 30€ das Stück. Es gibt aber auch Motoranbieter die 4 Motoren für 15€ verkaufen. Das entspricht 3.75€ pro Motor. Das ist zu billig. Ich rate stark davon ab Teile für solche Preise zu kaufen. Es ist verlockend aber nur im ersten Moment. Wenn man die Teile dann im Einsatz hat wird man schnell herausfinden, warum diese so billig sind. Gerade bei Akkus kann das schnell sehr gefährlich werden.
Wie schwer ist Drohne fliegen?
Drohne fliegen kann sehr leicht aber auch sehr schwer sein. Die Markendrohnen, welche heut zu tage auf dem Markt sind, lassen sich meist sehr leicht fliegen. Das liegt daran, dass die Firmen eine möglichst große Zielgruppe ansprechen wollen. Die Drohnen richten sich meist selbst immer wieder auf, können eingestellte Höhen halten, den Wind auskorrigieren und teilweise sogar alleine fliegen.
Selbstgebaute Drohnen können das Gleiche, wenn man sie richtig einstellt und die nötigen Sensoren dafür verbaut. Das schöne an selbstgebauten Drohnen ist aber auch, dass man sie so einstellen kann wie man möchte. So ist es nicht unüblich, dass man die ganzen Helferlein kurzerhand deaktiviert und die Drohne wirklich selbst fliegt. Das kann dann auch mal richtig anspruchsvoll werden und mehrere Monate Übung bedeuten (je nachdem wie gut man sein will).
Die Firmware auf den Flightcontrollern hält verschiedene Flugmodi zur Auswahl bereit. So kann man beispielsweise einstellen, dass sich die Drohne immer wieder selbst ausrichtet, sobald man die Finger vom Transmitter nimmt. Auf der anderen Seite kann man aber auch einstellen, dass man selbst alles ausbalancieren muss. Dadurch kann man dann auch „wildere“ Manöver fliegen und die Drohne ausreizen. Es gibt auch Modi dazwischen. So kann man langsam aber sicher besser fliegen lernen ohne große Frustration. Wie beim Fahrradfahren mit und dann später ohne Stützräder.
Unten ein kleines Video zur Inspiration 😉
Welche Fernbedienung (Transmitter) benötige ich für meine Drohne?
Grundlegend braucht man eine Fernbedienung, welche mit dem verwendeten Receiver kompatibel ist. Zu Kompatibilität findest du weiter oben mehr. Ich persönlich rate dazu erst den Transmitter zu wählen und dann darauf aufbauend den passenden Receiver und nicht anders herum.
Bei den Transmittern gibt es ein großes Spektrum an Qualität und Preis. Signale werden über sogenannte Channel übertragen. Gewisse Transmitter unterstützen nur die vier grundlegenden Channel, welche zum Fliegen einer Drohne benötigt werden. Diese Channel sind Throttle/Yaw/Pitch/Roll und werden durch die beiden Sticks am Transmitter bestimmt. Wem das pure Fliegen reicht, der kann einen Transmitter und Receiver mit 4 Channeln nehmen. Wer aber mehr Funktionen wie Landing-Gear, Licher, Arm/Disarm Funktion, Alarm usw. haben möchte, der braucht einen Transmitter, welcher auf mehr als 4 Channel senden kann.
Neben den Channeln gibt es noch andere Unterschiede. Zum Beispiel gibt es Transmitter in allen möglichen Formen und Größen. Falls du es noch nicht wusstet, es gibt unterschiedliche Arten einen Transmitter zu halten. Manche Menschen legen ihre Daumen auf die beiden Sticks drauf. Andere wiederum packen die beiden Sticks jeweils mit Daumen und Zeigefinger. Wieder andere machen eine Mischung aus beidem. Welcher Typ du bist, musst du durch Probieren herausfinden. Generell ist es aber so, dass manche Transmitter für manche Hände zu groß/klein sind oder nicht angenehm zu halten sind, je nachdem wie du die Sticks hältst.


Wie kann ich mit meiner selbstgebauten Drohne Videoaufnahmen machen?
Das kommt ganz darauf an welche Vorstellungen du von deinen Aufnahmen hast. Es gibt zum Beispiel Frames, welche speziell dafür designet sind, dass man eine kleine Actioncam (z.B. GoPro) anbringt. So kann man ohne Gimbal oder teure Kamera schon recht passable Aufnahmen machen. Wem das aber zu verwackelt und von zu schlechter Qualität ist, der kann sich auch eine Drohne mit Kamerahalterung bauen. Dazu verwendet man einen großen Frame und schraubt unten einen Kamerahalterung an. Auch hier sind einem keine Grenzen gesetzt. Du möchtest eine kleine Kamera an deine Drohne schrauben? Kein Problem! Du möchtest eine dicke Kamera mit elektrischem Gimbal zur Bildstabilisation an deine Drohne schrauben? Auch kein Problem! Das wichtigste ist, dass deine Drohne das Gewicht der Kamera tragen kann. Dazu musst du die Drohne samt allem wiegen und dann Motoren raussuchen, welche zusammen etwa 1 ½ mal so viel Schub erzeugen.
Welche Propeller brauche ich?
Dazu habe ich einen ganzen Artikel geschrieben. Grundlegend kann man aber sagen gibt es drei Dinge die passen sollten. Als erstes muss man sich überlegen wie viele Blätter die Propeller haben sollen. Propeller mit zwei Blättern beispielsweise sind Energieffizienter, liefern dafür aber auch weniger Power. Propeller mit drei oder gar vier Blättern bringen mehr Power, machen das Flugverhalten reaktiver, ziehen dafür aber auch mehr Strom. Als zweites sollte man schauen, dass die Propeller auch auf den Motorschaft passen. Haben sie denselben Innendurchmesser wie der Schaft, werden sie geschraubt oder nur gesteckt, usw. Als drittes ist die Größe der Propeller entscheidend. Auch hier gibt es Vor- und Nachteile (genaueres in meinem Artikel über Propeller). Generell sollte man natürlich darauf achten, dass der Propeller nicht zu groß für den Frame ist.
.
Alle Informationen:
Der Rote Button führt dich zur Informationsseite
Der gelbe Button führt dich zu meiner Kaufempfehlung