Flight Controller Information
Wie wähle ich den richtigen Flightcontroller?
Was ist ein Flight Controller und für was brauch man ihn?
Der Flightcontroller (deutsch: Flugregler) ist das Gehirn deiner Drohne. Hier laufen alle sensorischen Informationen zusammen und werden verarbeitet. Der Flightcontroller sendet aber auch Information, um beispielsweise den Motoren deiner Drohne zu sagen, wie schnell sie sich drehen sollen. Kurz gesagt ist die Aufgabe deines Flugreglers die immense Menge an Informationen, die deine Drohne um fliegen benötigt, zu verarbeiten und zu koordinieren. Um alles berechnen zu können hat jeder Flightcontroller einen Prozessor. Es handelt sich also um einen kleinen Computer.
Flight Controller Firmware Flashen
Die Firmware ist das was den Flight Controller von den meisten anderen Bauteilen abhebt. Man verkabelt ihn nicht einfach und fliegt dann los. Vorher müssen erst noch wichtige Konfigurationen vorgenommen werden.
Das erste was man generell tun sollte, wenn man sich einen neuen Flight Controller zugelegt hat, ist die aktuellste Firmware aufzuspielen. Dazu muss man erstmal in Erfahrung bringen welche Firmware man überhaupt flashen muss/will. Mittlerweile hat man nämlich die Qual der Wahl, weil es mehrere verschiedene Firmwares gibt. Die Gängigsten sind Betaflight, Cleanflight, Raceflight und KISS. Betaflight und Cleanflight wird von den meisten Flight Controllern unterstützt. Raceflight und KISS hingegen werden nur von einer Hand voll Flight Controllern unterstützt. Des Weiteren gibt es noch leicht abgeänderte Firmwares. Zum Beispiel Butterflight, welches eigentlich nur eine kleine Modifikation von Betaflight ist. Generell ist Betaflight eine sehr gute Wahl.
Die folgende Erklärung ist speziell für Betaflight.
Als erstes musst du dir den Betaflight-Konfigurator herunterladen. Auf dieser Seite ganz nach unten scrollen und die passende Datei für das eigene Betriebssystem herunterladen.
Anschließend Betaflight öffnen und den Flightcontroller an den Computer anschließen. Anschließend links auf den Reiter „Firmware Flasher“ klicken.

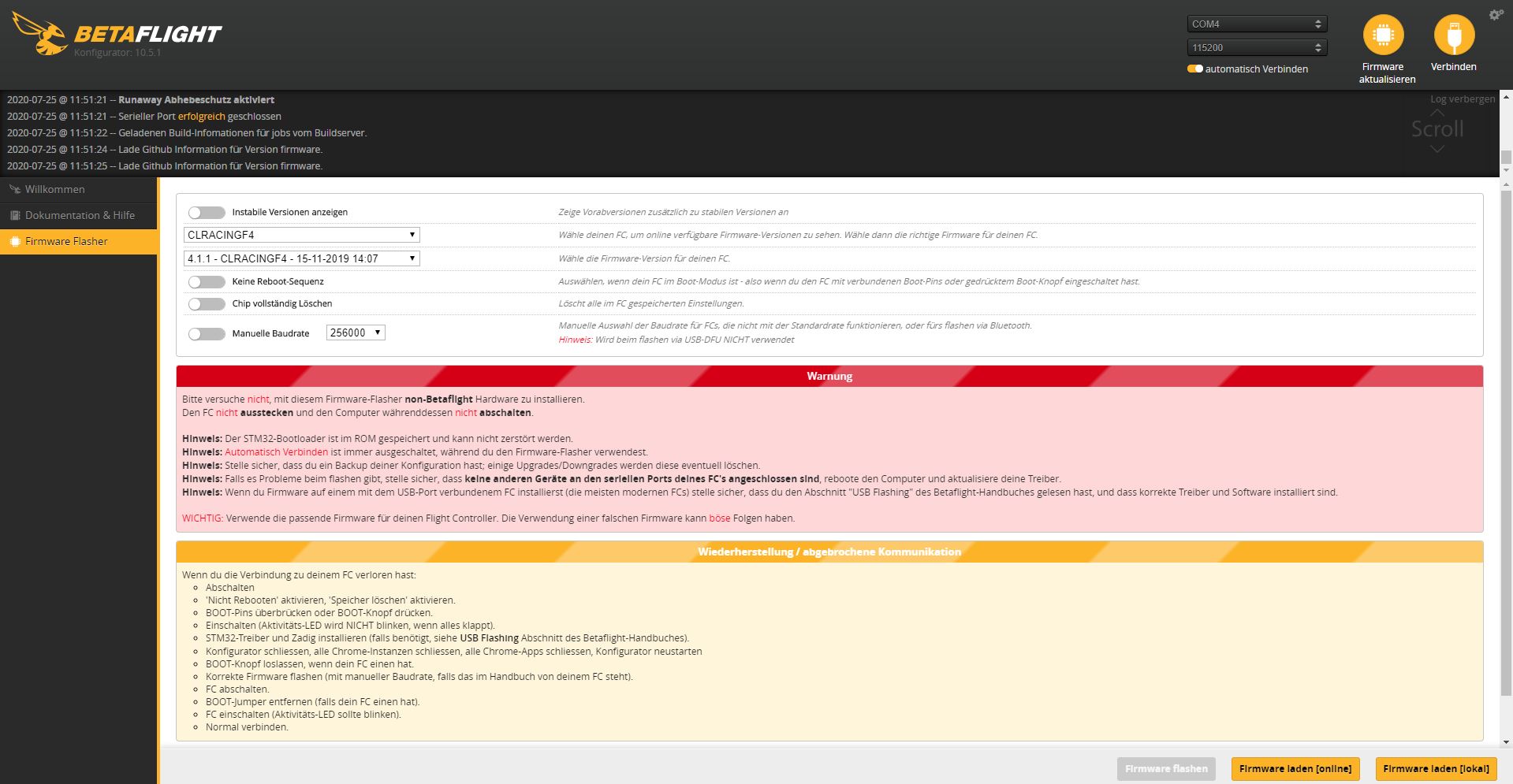
Normalerweise müsste bei Board und Firmware jetzt automatisch die richtige Konfiguration ausgewählt sein. Wenn nicht, dann musst du das manuell tun. Die anderen Schalter solltest du am Anfang nicht aktivieren (außer du weißt was du tust).
Nun musst du auf „Firmware laden [online]“ drücken und wenn das Programm alle Daten zusammen hat, dann kannst du auf Flash Firmware drücken.
Danach sollte die Firmware wenn alles geklappt hat auf dem Flight Controller sein. Du kannst dann mit den Einstellungen des Controllers fortfahren, indem du oben rechts auf „Verbinden“ drückst.
Flight Controller konfigurieren/einstellen:
Im Folgenden werde ich durch alle Schritte gehen, welche nötig sind, um deinen Flightcontroller vollständig zu konfigurieren. Die Konfiguration ist sehr umfangreich und kostet Zeit. Stelle also sicher, dass du mindestens eine Stunde zur Verfügung hast. Bitte sei nicht enttäuscht, wenn nicht alles von vorne rein funktioniert. Das ist völlig normal.
Bitte beachte auch, dass diese Konfiguration eine bereits vollständig zusammengebaute Drohne voraussetzt. Wenn die Motoren beispielsweise noch nicht angelötet sind, dann kannst du einen Teil der Konfiguration noch nicht machen.
ENTFERNE BEVOR DU ANFÄNGST ALLE PROPELLER -> DIE KONFIGURATION KANN FALSCH AUSGEFÜHRT ZU FEHLFUNKTIONEN FÜHREN UND MIT ANGEBRACHTEN PROPELLERN ZU SCHWEREN VERLTZUNGEN FÜHREN!
Backup:
Bevor man anfängt Konfigurationen vorzunehmen, macht man normalerweise erstmal ein Backup der Einstellungen. Das kann sehr nützlich sein, weil die Hersteller manchmal (vor allem bei Ready to Fly Modellen) bereits passable Standarteinstellungen getätigt haben. Wenn man jetzt selbst mit allen möglichen Einstellungen rumspielt, dann kann es passieren, dass man hinterher eine schlechtere Konfiguration hat. Mit einem Backup verliert man so wenigstens die Standartkonfiguration nicht.
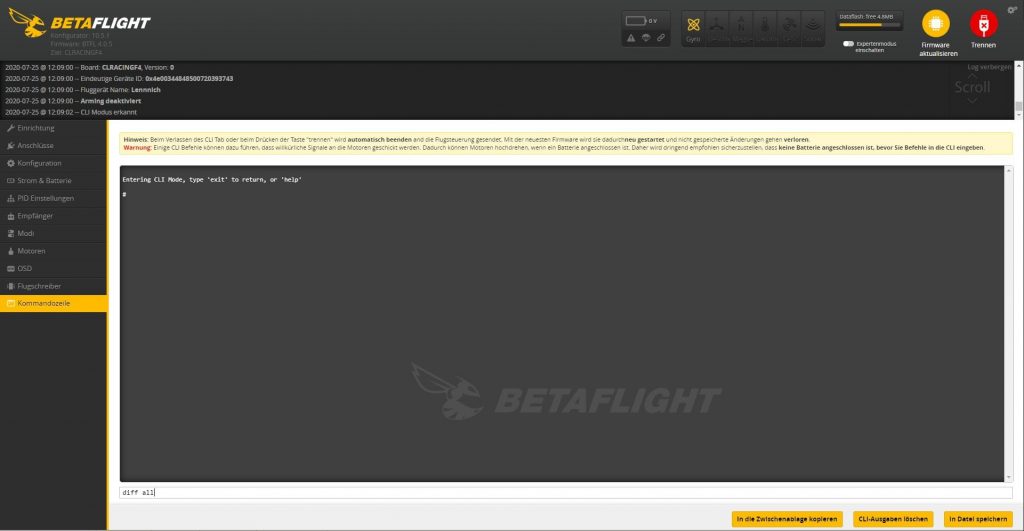
- FC and Computer anschließen und auf verbinden drücken
- Aus der Liste links den Tab „Kommandozeile“ wählen (meist ganz unten)
- In das Eingabefeld den Befehl „diff all“ eingeben
- Auf den Button „In Datei speichern“ klicken
- Fertig
Receiver mit FC verbinden:
Der Receiver empfängt Signale vom Transmitter und leitet diese weiter an den Receiver. Als erstes muss man den Receiver mit dem Flightcontroller verlöten. Dabei verlötet man das Signalkabel des Receivers mit einem der UART’s des Flugreglers. Man muss hier auf Besonderheiten des eigenen Flighcontroller‘s achten. Am besten lädt man sich vorher eine Anleitung zum FC aus dem Internet herunter. Wenn alles verlötet ist, dann muss man den Receiver mit dem Transmitter „pairen“. Dazu schaust du einfach in die Anleitung deines Receivers. Meist muss man einen Knopf für ein paar Sekunden gedrückt halten, während man den Transmitter anschaltet. Anschließend muss man den Flightcontroller per Computer noch mit dem Receiver verbinden (Software einstellen).
- Flightcontroller an Computer anschließen und auf „Verbinden“ drücken.
- Links den Tab „Anschlüsse“ auswählen und bei dem UART auf welchen man das Signalkabel gelötet hat den „Serieller Empfänger“ Schalter umlegen. (Wenn du nicht sicher bist welcher UART das ist, dann musst du auf deinem FC nachschauen. Die Pins sind meistens nummeriert. Wenn du also dein Signalkabel an beispielsweise „RX2“ angeschlossen hast, dann musst du den UART 2 als „Serieller Empfänger“ ankreuzen.
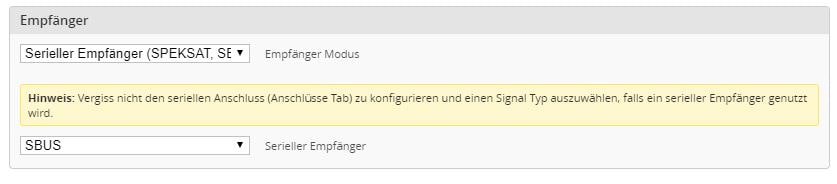
- Links den Tab „Konfiguration“ wählen und ein wenig runterscrollen bis zu den Einstellungen zu „Empfänger“.
- Dort musst du dann den Empfänger-Modus wählen. Wenn du nicht weißt welchen Empfänger-Modus du hast, dann musst du einfach die Produktbeschreibung deines Receivers durchlesen. Dort steht alles.
Ein kleines Stück unten drunter musst du noch den Seriellen Empfänger wählen. Auch hier kannst du in der Produktbeschreibung deines Receivers nachschauen.

- Links den Tab „Empfänger“ wählen. Wenn du jetzt deinen Transmitter anmachst und die Sticks bewegst kannst du hier sehen, ob der Flightcontroller die Signale empfängt. Bei manchen Receivern reicht es nicht, dass die Drohne per USB am Computer angeschlossen ist. Du musst sie manchmal direkt per Akku mit Strom versorgen, dass der Receiver funktioniert. Bitte schraube dazu vorher alle Propeller ab.
- Jetzt solltest du sehen, dass sich die einzelnen Balken bewegen, wenn du die Sticks an deinem Transmitter bewegst.
Die Balken links sind alle beschriftet. Die ersten vier sind Roll, Pitch, Yaw und Throttle. Man kann seinen Transmitter nach den eigenen Bedürfnissen belegen.
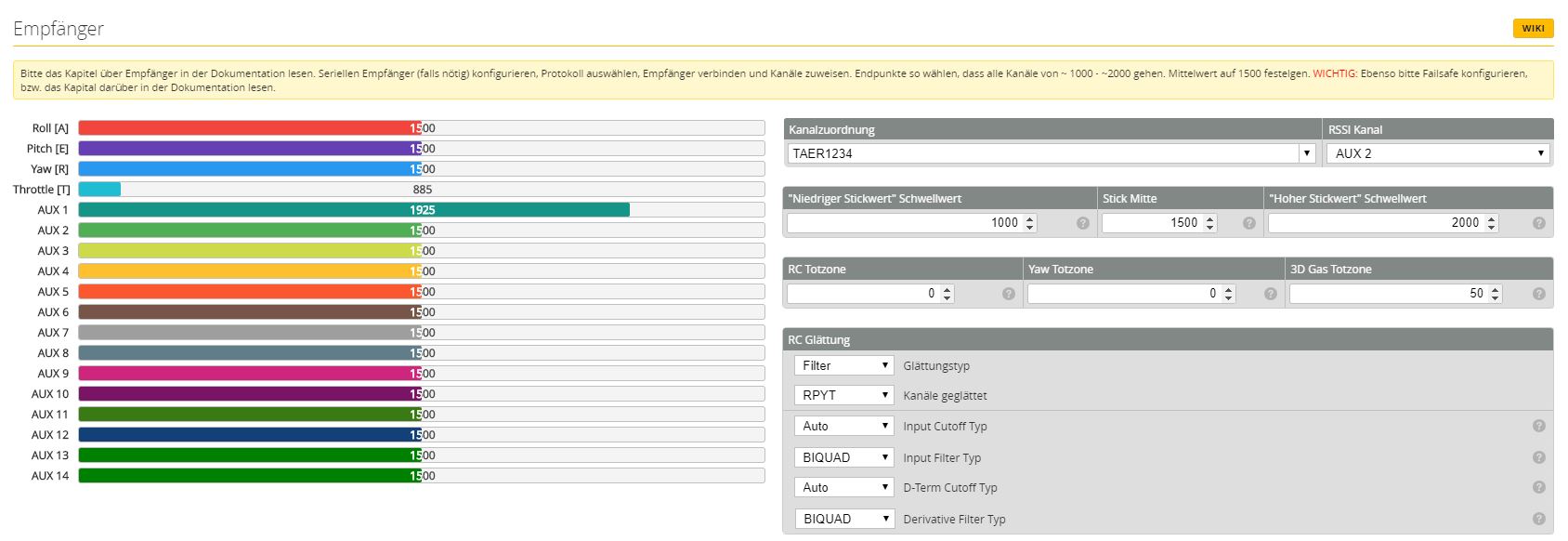
Man spricht auch von den Stick-Modes. Hier geht es lediglich um die persönliche Präferenz. Hier mal die beiden meist verwendeten Modes:
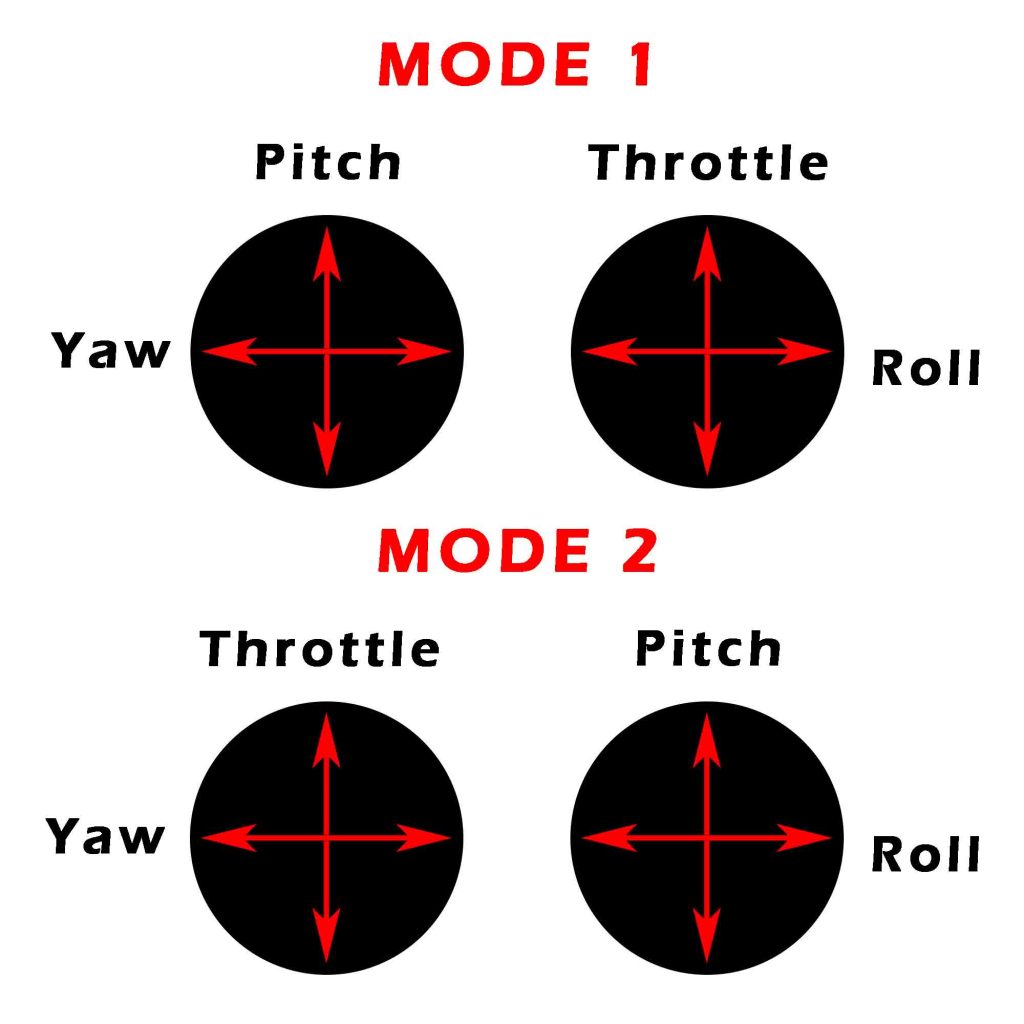
Je nachdem welchen Mode man bevorzugt muss man jetzt schauen ob sich die jeweils richtigen Balken bewegen, wenn man die jeweiligen Sticks am Transmitter bewegt. Wenn ich beispielsweise Mode 2 wähle, dann sollte sich der Balken „Throttle“ bewegen, wenn ich den linken Stick nach oben und unten drücke.
Falls die Belegung nicht stimmen sollte, dann kann man rechts bei „Kanalzuordnung“ eine andere Zuordnung wählen. Einfach den Pfeil nach unten drücken und das passende auswählen. Falls nicht das Passende dabei ist, dann kann man auch einfach die Reihenfolge der Buchstaben „AERT“ ändern.
- Unten rechts auf „Speichern“ drücken
- Fertig
Arm-Switch und andere Funktionen konfigurieren:
Der Arm-Switch bezeichnet einen Schalter an deinem Transmitter, welcher dazu dient deine Drohne bzw. die Motoren deiner Drohne einzuschalten. Der Grund hierfür ist, dass Propeller und Drohnen generell sehr gefährlich sein können. Man möchte auf keinen Fall, dass man ausversehen losfliegt und sich oder jemand anderen verletzt. Wenn die Drohne nicht „gearmt“, also scharfgeschalten ist, dann passiert nichts, wenn man an der Fernbedienung die Sticks bewegt. Wenn man aber den Arm-Switch umlegt, gehen die Motoren an und die Drohne reagiert auf den Input vom Transmitter. Außerdem kann man mit dem Arm-Switch die Drohne und die Motoren ausschalten, wenn man abgestürzt ist. Dadurch drehen sie sich nicht weiter, wodurch das Verletzungsrisiko und das Beschädigungsrisiko der Drohne sinken.
- Man muss sich überlegen welchen Schalter man am Transmitter verwenden möchte. Möglicherweise muss man am Transmitter diesem Schalter einen Channel zuweisen (Am besten in die Anleitung des Transmitters schauen)
- Flightcontroller an Computer anschließen und auf verbinden drücken
- Link bei den Tabs „Empfänger“ auswählen
- Jetzt legt man den Schalter, welchen man als Arm-Switch verwenden möchte am Transmitter um. Nun sollte sich einer der Balken (AUX1 – AUX14) bewegt haben. Die Zahl des Balkens (Zahl welche hinter AUX steht) muss man sich jetzt merken
- Links bei den Tabs muss man jetzt „Modi“ auswählen
Dann klickt man bei „Arm“ auf „Bereich hinzufügen“ und wählt anschließend bei dem kleinen Drop-down-Menü das AUX mit der gemerkten Zahl hinten dran an.
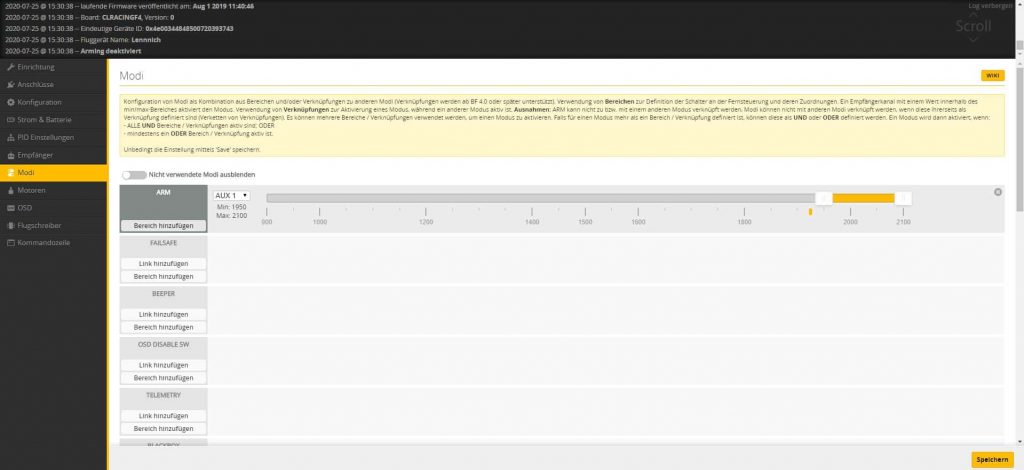
- Man kann jetzt mit dem Orangenen Balken einen Bereich einstellen, in welchem das Arming aktiviert und deaktiviert ist. Wenn man den Schalter beim Transmitter umlegt, dann sollte der kleine Zeiger im orangenen Bereich liegen. Wenn man den Schalter wieder in seine Ausgangsstellung schiebt, dann sollte der kleine Anzeiger im grauen Bereich sein.
- Du kannst jetzt noch andere Modi auf dieselbe Weise konfigurieren. Beispielsweise „AngleMode“. Der Arm-Switch ist aber die einzige Funktion, welche absolut notwendig ist.
- Unten rechts auf „Speichern“ drücken
- Fertig
Motoren einrichten:
Bei diesem Schritt ist besondere Vorsicht geboten. Entferne hier auf jeden Fall die Propeller. Durch kleinste Fehler könntest du dich mit angeschraubten Propellern schwer verletzen!
Wenn etwas nicht klappt, dann entferne den Akku während du nach einer Lösung schaust. Eine Drohne kühlt sich durch den Flugwind. Ein angeschlossener Akku kann bei Stillstand nach längerer Zeit für eine Überhitzung verschiedener Komponenten führen.
- Propeller abnehmen (wichtigster Schritt!!!)
- Drohne mit Computer verbinden und auf „Verbinden“ drücken
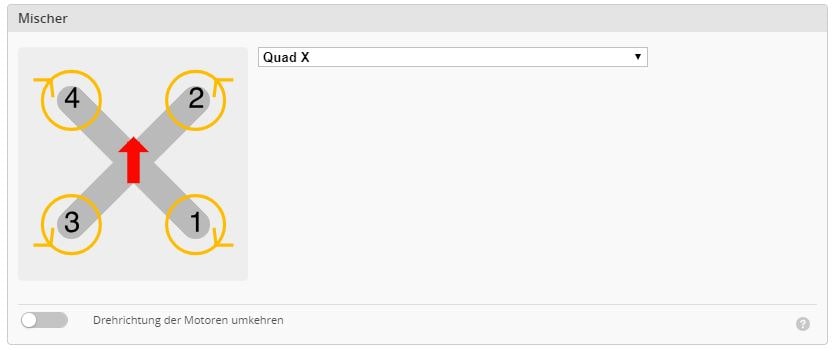
- Links den Tab „Konfiguration“ auswählen. Dort muss man links beim „Mischer“ die Form seiner Drohne auswählen. Bei den meisten wird das „Quad X“ sein.
Anschließend macht man sich am besten mit dem Smartphone ein Bild von der Darstellung. Diese verrät einem nämlich, in welche Richtung sich die einzelnen Motoren drehen sollten.
- Rechts bei „ESC / Motor Funktionen“ muss man noch das passende ESC-Protokoll wählen. Wenn man nicht weiß welches Protokoll das Passende ist, dann muss man einfach im Internet (zum Beispiel Banggod /Amazon oder direkt beim Hersteller) nachschauen, was in der Produktbeschreibung steht
- Unten rechts auf „Speichern“ drücken
- Akku an Drohne anschließen
- Links den Tab „Motoren“ auswählen
- Rechts bei der kleinen weißen Box den Schalter bei „Ich weiß was ich mache“ umlegen (Nur umlegen, wenn man die Propeller abgemacht hat)
- Den Master-Switch für kurze Zeit leicht anheben. Jetzt sollten sich alle Motoren drehen. Wenn sie sich nicht drehen, dann kannst du links den Tab „Konfiguration“ auswählen und rechts bei „ESC / Motor Funktionen“ den Wert für „Motor Leerlauf Gas Wert [Prozent] leicht erhöhen
- Um zu überprüfen, ob sich die Motoren in die richtige Richtung drehen, ist es empfehlenswert einen kleinen Klebestreifen oben am Motorschaft anzubringen. Wenn sich die Motoren jetzt alle drehen, wird es dadurch leichter die Drehrichtung zu erkennen. Man gleicht jetzt die Drehrichtung jedes Motors mit der Abbildung von vorhin ab. Wenn ein Motor sich in die falsche Richtung dreht, dann notiert man das
- Akku entfernen
- Bei allen Motoren, welche sich jetzt in die falsche Richtung gedreht haben, muss man zwei der drei Kabel vertauschen. Es ist dabei völlig egal welche beiden Kabel man vertauscht. Wenn fertig nochmal ab Punkt 7 die Anleitung durchgehen.

- Unten rechts auf „Speichern“ drücken
- Fertig
Testen:
Wenn du die Schritte oben befolgt hast und alles soweit geklappt hat, dann bist du theoretisch mit den Basics fertig.
Du kannst jetzt testen ob alles geht.
- Drohne nicht mit Computer verbinden (Kabel entfernen)
- Sicherstellen, dass keine Propeller angebracht sind
- Transmitter anmachen
- Akku anschließen
- Arm-Switch umlegen (Motoren sollten drehen) und die Sticks des Transmitters bewegen (Motoren sollten Reaktion zeigen)
- Fail-safe Test durchführen!!! Failsafe ist ein Protokoll, welches deine Drohne aktiviert, wenn sie den Funkkontakt zu deinem Transmitter verliert. Bei einem Verbindungsabbruch schalten sich normalerweise nach etwa einer Sekunde die Motoren ab. Dadurch wird verhindert, dass deine Drohne wegfliegt, falls du die Verbindung zu ihr verlierst.
Um zu testen ob Failsafe funktioniert schaltest du einfach deinen Transmitter aus, während sich die Motoren drehen (natürlich ohne angebrachte Propeller). Wenn die Motoren nach einer Sekunde oder weniger aufhören sich zu drehen, dann ist alles gut. Falls es länger dauert, sie gar nicht aufhören zu drehen oder gar schneller werden musst du unbedingt die Fail-Safe Einstellungen bearbeiten. Verbinde dazu deine Drohne mit einem Computer, wähle „Verbinden“, aktiviere oben den Schalter „Expertenmodus einschalten“ und gehe anschließend links zum Tab „Failsafe“
- Wenn alles funktioniert bist du fertig und kannst endlich fliegen gehen!
Beim ersten Flug gilt:
- Viel Abstand
- Nicht innen, sondern draußen
- Beim ersten Mal ganz sanft Gas geben
- Wenn irgendetwas komisch ist sofort disarmen, Akku entfernen und mögliche Probleme suchen.
- Auf keinen Fall mit gearmter Drohne in der Hand laufen.
- Nicht die eigenen Fähigkeiten überschätzen
Im Folgenden noch ein paar Informationen zu den Spezifikationen von Flightcontrollern, um dir die Kaufentscheidung zu vereinfachen.
Mounting Pattern (Montagemuster)
Der Flightcontroller wird mit Schrauben an der Drohne befestigt. Die verschiedenen Mounting-Patterns beschreiben den Abstand zwischen den Löchern im Flightcontroller, welche für die Befestigungsschrauben vorgesehen sind. Grundlegend muss man darauf achten, dass der Frame kompatibel mit dem Mounting Pattern des Flight Controllers ist. Der Frame braucht also Vorbohrungen mit denselben Abständen.
Unten eine Grafik welche die gängigsten Mounting-Patterns zeigt:

Der Prozessor
Der Prozessor, welcher in einem Flightcontroller verbaut ist, wird auch Mikroprozessor genannt. Er führt genauso wie der Prozessor in einem Computer eine Unmenge an Berechnungen durch. Mikroprozessoren sind aber im Vergleich zu einer CPU in einem PC um einiges weniger leistungsfähig. In der Regel wird ein „STMelectronics 32-bit mircoprocessor“ als Mikroprozessor für verschiedenste Flight Controller verwendet. All diese STM32 Mikroprozessoren stammen vom europäischen Halbleiterhersteller STMelectronics. STM32 bezeichnet eine Familie von verschiedenen Prozessoren. Am häufigsten werden die Modelle STM32 F1, F3, F4 und F7 verbaut. Wenn dich dieser ganze Technikkram langweilt habe ich hier eine ganz einfache Faustregel:
Je höher die Zahl nach dem „F“, desto schneller kann der Mikroprozessor rechnen.
- F7 ist schneller als F4. F4 ist schneller als F3 und F3 ist schneller als F1.
Oft sind die Flightcontroller mit höherer Zahl nach dem F nicht nur schneller, sondern bringen dazu noch zusätzliche Funktionen mit sich.
Zurzeit gibt es 10 verschiedene Modelle des STM32 Prozessors. Von langsam nach schnell sortiert:
L0, L1, L4, F0, F1, F2, F3, F4, F7 und H7
Hier eine kleine Übersicht zu den verschiedenen Modellen.
| Prozessor | Prozessor Geschwindigkeit | UART'S | Flash Speicher |
|---|---|---|---|
F1 (STM32F103CBT6) | 72MHz | 2 | 128KB |
F3 (STM32F303CCT6) | 72MHz | 3 | 256KB |
F4 (STM32F405RGT6) | 168MHz | 5 | 1MB |
F7 (STM32F745VG) | 216MHz | 8 | 1MB |
H7 (STM32H750) | 480MHz | --- | 128KB |
F1 FC:
Der F1 FC war der erste Flight Controller der in einem Miniquad verwendet wurde. Er hat mit seinen 72MHz eine für heutige Verhältnisse sehr geringe Rechenleistung. Seit 2017 gilt er als outdated, weil Betaflight den Support eingestellt hat. Mit seinen 2 UART’s ist er zudem nicht wirklich gerüstet für Erweiterungen. Einer der beiden UART’s konnte übrigens gar nicht wirklich verwendet werden, weil die F1 Flight Controller noch keinen integrierten USB Anschluss zur Verbindung mit einem Computer hatten. Dafür musste man nämlich einen der beiden UART’s verwenden. Der F1 Flight Controller ist mit dem IPhone 3 vergleichbar. Viel Nostalgie und damals ein Hit, heute vergessen und outdated.
F3 FC:
Der F3 hingegen spielt im Vergleich zum F1 in einer anderen Liga. Ja auf den ersten Blick sind keine großen Veränderungen erkennbar. Immerhin hat er dieselbe Prozessorgeschwindigkeit wie der F1 FC. Durch die neu eingesetzte FPU (Floating Point Unit), welche zur Berechnung von Gleitkommazahlen dient, ist der F3 schneller als der F1. Zudem hat der F3 mit 3 verwendbaren UART’s zwei mehr als der F1. Dieses Mal sind zum Glück alle UART’s voll verwendbar, weil dem F3 ein integrierter USB Anschluss zur Verbindung mit einem Computer verpasst wurde. Neben dem USB Anschluss haben F3 Boards oft auch integrierte 5v Spannungsregulatoren. Dadurch kann man einen LiPo-Akku direkt an den Flight Controller anschließen. Des Weiteren haben F3 Boards von Haus aus invertierte UART’s, was die Benutzung von SBUS und SmartPort um einiges erleichtert.
F4 FC:
Mit der voranschreitenden Entwicklung hat die Rechenleistung des F3’s nicht mehr mit den zahlreichen neuen Features mithalten können. Dann kam der F4, welcher mehr als doppelt so viel Rechenleistung mit sich brachte. Die F4 Boards können eine Looptime von bis zu 32KHz erreichen. Eine weitere riesige Erneuerung ist, dass man auf den F4 Boards bis zu 5 UART’s finden kann. Leider sind diese UART’s, nicht wie beim F3 oder F7 von Haus aus invertiert. Wer also SBUS oder SmartPort verwenden möchte, sollte sich vorher informieren ob der Flight Controller diese Signale invertieren kann (oder man sucht nach einem sogenannten Inversion Hack).
F7 FC:
Der F7 Flight Controller ist ein aktueller Controller. Langsam aber sicher behaupten sie sich auf dem Markt und stehlen den älteren Modellen die Show. Sie haben nochmal deutlich mehr Rechenleistung als die F4 Boards. Zudem sind hier mehr als 5 UART’s möglich. Selbstverständlich sind die meisten F7 Boards in der Lage eine Looptime von 32KHz zu erreichen. Im Moment sind sie natürlich teurer als ältere Modelle. Vielleicht lohnt sich aber die Investition, wenn man sich die Leistung und die Möglichkeiten zur Erweiterung anschaut.
H7 FC:
Zu guter Letzt noch die H7 Boards. Sie sind im Moment die neuesten Boards. Zum Großteil werden sie zurzeit aber in der Pro Racing Szene eingesetzt. Zurecht! Denn sie haben mit 480MHz immerhin mehr als doppelt so viel Rechenleistung als die eigentlich sehr aktuellen F7 Controller. Wirklich etabliert haben sie sich im Moment aber noch nicht.
Looptime:
Um zu verstehen was die Looptime ist, muss man verstehen was PID-Werte sind. Ein PID-Controller wird von jeder Drohne benötigt. Er hat die Aufgabe die Drohne von ihrem Ist-Zustand in ihren Soll-Zustand zu führen. Wenn ich also beispielsweise der Drohne sage, dass sie sich um 180° drehen soll, dann sorgt der PID-Controller dafür, dass sie ziemlich genau diese 180° Drehung vollführt. Das ganze funktioniert mit Feedback-Loops. Das heißt die Drohne überprüft ständig, ob sie mit ihrer derzeitigen Bewegung meine Vorgabe (180° Drehung) erfüllt. Wenn sie das nicht tut, dann sagt der Feedback-Loop, dass etwas nicht stimmt und die Drohne korrigiert ihren Kurs. Das Ziel des PID-Loops ist es also die Befehle des Benutzers so genau und präzise wie möglich umzusetzen.
Die Looptime (deutsch: Schleifenzeit) gibt an wie oft der PID loop pro Sekunde ausgeführt wird oder in anderen Worten, wie lange der Flight Controller brauch um einen Loop durchzuführen. Wenn der PID-loop mit einer Frequenz von 1KHz läuft, dann wird er 1000 mal in einer Sekunde ausgeführt. Dementsprechend ist die Looptime dann 1ms, weil der Flight Controller 1ms benötigt um einen Loop auszuführen. Achtung jetzt bitte nicht verwirren lassen! Je höher die PID-loop Frequenz ist, desto kleiner ist die Looptime. Bei einer PID-loop Frequenz von 2KHz ist die Looptime 0,5ms. Denn wenn in der Sekunde der PID-loop 2000-mal läuft (2KHz), dann muss jede 0,5ms ein Durchlauf stattfinden. (Ich hoffe ich konnte das einigermaßen verständlich erklären). Wie hoch die Looptime eines Flight Controllers ist, hängt von verschiedenen Faktoren ab. Die Flight Controller von heute haben Looptimes im Bereich zwischen 1KHz und 32KHz. Diese Looptime ist aber immer durch das schwächste Glied der Kette beschränkt. Zum einen wäre da das ESC Protokoll. Je nachdem welches Protokoll verwendet wird, kann die Zeit, welche benötigt wird um eine Information vom Flight Controller zu einem ESC zu senden, stark variieren. Eine weitere Beschränkung könnte die Gyro-Sampling Rate sein. Dazu mehr im nächsten Abschnitt.
Gyroskop / Gyrosensor
Neben dem Prozessor brauch dein Flightcontroller auch einen Gyro-Sensor und einen Beschleunigungssensor. Diese beiden Sensoren befinden sich in der IMU. IMU steht ihm englischen für „inertial measurement unit“. Auf deutsch ist die IMU mit dem bezaubernden und wohlklingenden Fachbegriff „Trägheitsmesseinheit“ zu übersetzen (Solche Wörter vergisst man zum Glück schon nach 2 Minuten wieder)
Für was ist das Gyroskop überhaupt zu gebrauchen? Ganz einfach! Das Gyroskop ist ein kleiner Sensor, mit dessen Hilfe der Flightcontroller genau weiß in welcher Orientierung sich die Drohne im Moment befindet. Beispielsweise kann er dadurch unterscheiden ob deine Drohne auf dem Kopf steht oder richtig rum ist, oder ob sie gerade in alle denkbaren Richtungen gleichzeitig schleudert, weil du mal wieder den Baum zu spät gesehen hast. Das macht der Gyrosensor, in dem er die Geschwindigkeit, mit welcher sich die Drohne gerade in der Pitch-, Roll- und Yaw-Achse rotiert berechnet. Die Leistungsfähigkeit eines solchen Gyrosensors kann man übrigens mit der Gyro-Sampling Rate beschreiben.
Gyro-Sampling Rate:
Die Gyro-Sampling Rate gibt an wie oft der Gyro-Sensor Informationen pro Sekunde ausliest. Die Gyro-Sampling Rate ist also ähnlich wie die Looptime. Wie oben schon beschrieben kann die Gyro-Sampling Rate das schwächste Glied in der Kette sein. Wenn der PID-loop eines Flight Controllers beispielsweise auf 32KHz läuft, bringen dir die 32KHz nichts, wenn dein Gyro-Sensor nur Informationen in einer Frequenz von 8KHz liefern. Das bedeutet für dich, dass du in deinen Einstellungen die Gyro-Sampling Rate immer so hoch stellen solltest, wie die Looptime.
Die beiden meist verwendeten Gyroskope sind einmal der MPU6000 und der ICM20602. Manche Flightcontroller haben sogar beide Gyros verbaut. Kurz gesagt ist der MPU6000 schon etwas älter und hat eine Gyro-Sampling Rate von 8KHz. Der ICM20602 ist aktueller und läuft mit einer Sampling Rate von 32KHz.
Beschleunigungssensor
So jetzt aber erstmal genug über den Gyro-Sensor. Für was brauch man denn dann überhaupt noch den Beschleunigungssensor, wenn der Gyro-Sensor doch schon so viel kann?
Der Beschleunigungsmesser (Accelerometer) misst nicht wie der Gyro-Sensor die Geschwindigkeit der Rotation in der Roll-, Pitch- und Yawachse. Nein er misst, wie sein Name schon vermuten lässt die Beschleunigung der Rotation in der Roll-, Pitch- und Yawachse. Das macht er um die konstante Erdbeschleunigung (Anziehungskraft der Erde) zu messen. Durch diese Messung weiß er wo oben und unten ist. Das ist besonders wichtig, wenn man in einem self-leveling Modus fliegt. Hier richtet sich die Drohne, wenn man die Steuerungssticks loslässt immer so aus, dass sie parallel zum Horizont steht. Fortgeschrittenere Piloten brauchen die self-leveling Funktion, welche mit den Stützrädern eines Fahrrades gleichgesetzt werden kann, nicht mehr. Da sie ohne self-leveling fliegen, brauchen sie den Beschleunigungssensor nicht weiter und können ihn deaktivieren.
UART's
Vorab: Die Anzahl der UART’s auf einem FC ist einer der wichtigsten Kaufkriterien.
UART ist die Abkürzung für Universal Asynchronous Receiver Transmitter. Ein UART ermöglicht die Kommunikation zwischen zwei Geräten. Es handelt sich dabei um eine serielle Schnittstelle die zur Dateiübertragung dient. Bei einem UART ist die Kommunikation nicht einseitig. Das bedeutet, dass durch einen UART verbundene Geräte, Daten senden und empfangen können.
Aber für was brauch ich denn jetzt diese UART’s?! Wenn man zum Beispiel vorhat GPS in seiner Drohne zu verwenden, dann muss man oft ein externes GPS-Modul mit einbauen. Irgendwie muss der FC mit dem GPS-Modul kommunizieren. Diese Kommunikation findet über die UART’s statt. Für SBUS, SmartPort telemetry, OSD und Blackbox sind übrigens auch UART’s notwendig. Logischerweise kann man so viele Geräte anschließen wie man UART’s hat. Die Faustregel hier ist: Je mehr UART’s umso besser!
Zusätzliche Sensoren und Funktionen
Wie ich oben erklärt habe besitzt ziemlich jeder FC einen Gyro-Sensor und einen Beschleunigungssensor. Darüber hinaus bieten viele Hersteller aber noch zusätzliche Sensoren und Funktionen an.
Soft Mounting:
Wie vorhin schon erläutert wird der FC per Schrauben am Frame befestigt. Diese Schrauben übertragen aber auch alle möglichen Schwingungen, welche zum Beispiel durch die Motoren in den Rahmen gelangen, zum FC weiter. Der Flightcontroller versucht, wie er es auch bei einem Windstoß macht, diese ungewollten Bewegungen auszugleichen. Das kann dazu führen, dass die Drohne unruhig fliegt und sich die Schwingungen in Form von kleinen Zuckungen negativ auf das Flugverhalten auswirken. Aus diesem Grund sollte man seinen FC von den Schwingungen des Rahmens isolieren. Dafür gibt es verschiedene Lösungsansätze.
- Anti-Vibrations-Schrauben, welche oben aus Plastik oder Gummi sind, und dadurch die Vibrationen nicht weitertragen
- Gummiringe, welche man zwischen Schraubenkopf und Flightcontroller anbringt.
- Sogenannte Grommets. Das sind kleine Gummiringe, welche man an der Innenseite der Bohrungen des Flightcontrollers anbringt. Durch sie werden dann die Schrauben gesteckt. Dadurch werden ebenfalls Vibrationen isoliert.
Zusätzliche Sensoren:
Ein Klassiker und zudem sehr praktischer zusätzlicher Sensor ist der Current-sensor (Strommesser). Mit ihm kann man zum einen direkt sehen wieviel Strom man im Moment verbraucht, aber man kann sich aus den Daten auch die insgesamt verbrauchten mAh und die damit ungefähr verbleibende Flugzeit ausrechnen lassen (Sehr zu empfehlen so ein Strommesser). Mittlerweile muss der Stromsensor aber nicht unbedingt im FlightController sitzen. Oft findet man ihn auch in ESCs oder PDBs. Wenn dein FC also keinen hat, dann schau doch einfach ob ein anderes deiner Bauteile einen an Board hat.
Für Medium bis Long-Range Piloten könnten auch der Barometer oder das GPS interessant sein. Mit dem Barometer kann die Drohne durch Messungen des Luftdrucks die ungefähre Flughöhe bestimmen. Dadurch können Funktionen wie automatische Flughöhenhaltung aktiviert werden. Das GPS ist besonders wegen seiner „Return to Home“ Funktion praktisch. Wenn zum Beispiel die Verbindung zur Drohne während des Fluges verloren gehen sollte, kann sie sich selbst orten und autonom zu ihrem Startpunkt zurückfliegen.
Zusätzliche Funktionen:
Mittlerweile gibt es dutzend zusätzlicher Funktionen. Ich kann unmöglich alle auflisten, aber ich versuche dir einen groben Überblick zu verschaffen.

Einer der nützlichsten Funktionen ist das On Screen Display (OSD). Es ermöglicht dir sämtliche Telemetriedaten und vieles Mehr in deiner live Videoübertragung anzuzeigen. So kannst du während du fliegst auf einen Blick sehen, wie sehr du deinen Akku schon gequält hast und wie viele Ampere gerade durch deine armen ESC’s strömen.
Black-Box data logging ist einer meiner Favoriten. Die Blackbox in deiner Drohne funktioniert hier ähnlich wie die Blackbox in einem Flugzeug. Während du fliegst werden alle möglichen Daten von sämtlichen Sensoren auf dem internen Flashspeicher deines FC oder einer externen SD-Karte gespeichert. So kannst du nach dem Flug deine ganzen Telemetriedaten in aller Ruhe auswerten. Somit kannst du zum Beispiel relativ simpel Rückschlüsse ziehen wo zum Beispiel ungewollte Vibrationen ihren Ursprung haben.
Eine weitere sehr nützliche zusätzliche Funktion ist ein integrierter 4 in 1 ESC (Du weißt nicht was ein ESC ist? Kein Problem dazu gibt es natürlich auch einen Artikel). Normalerweise braucht man für jeden Motor einen ESC. Bei einem 4 in 1 ESC sind aber alle ESC’s auf einer Platine. Wenn dieser 4 in 1 ESC dann noch in den FC integriert ist bringt das viele Vorteile. Zum einen spart es Unmengen an Platz, meist spart man Gewicht, die Komplexität der Verkabelung wird verringert und zudem sieht es meist besser aus (jedenfalls aus meiner subjektiven Wahrnehmung).
Ein sehr wichtiges aber mittlerweile eigentlich in jedem Flighcontroller vorhandenes Feature ist der Spannungsregler (BEC). Dieser wandelt die Batteriespannung, welche bei Drohnen meist zwischen 7V und 22V liegt, in 5V um. Warum 5V? Weil alle möglichen anderen Bauteile wie Kamera, Videotransmitter, LED-Streifen usw. meist auf 5V laufen.
